
内陆水体浊度遥感监测研究进展与未来趋势
|
李洋(2000—),男,吉林省松原人,硕士研究生,从事水遥感监测研究。E-mail: 15948829020@163.com |
收稿日期: 2024-03-12
修回日期: 2024-08-31
网络出版日期: 2026-03-12
版权
Research progress and future trends in remote sensing monitoring of turbidity in inland water bodies
Received date: 2024-03-12
Revised date: 2024-08-31
Online published: 2026-03-12
Copyright
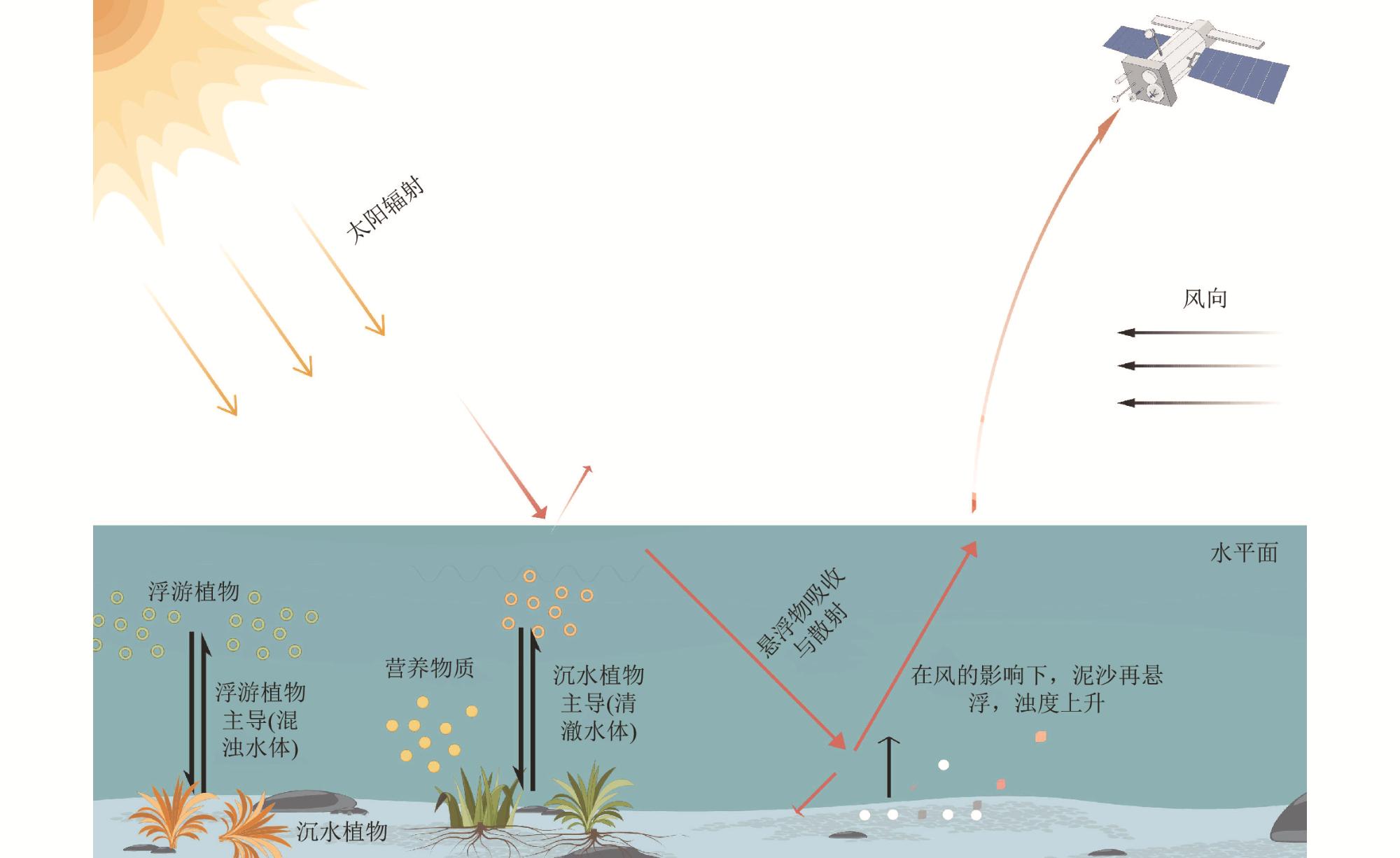
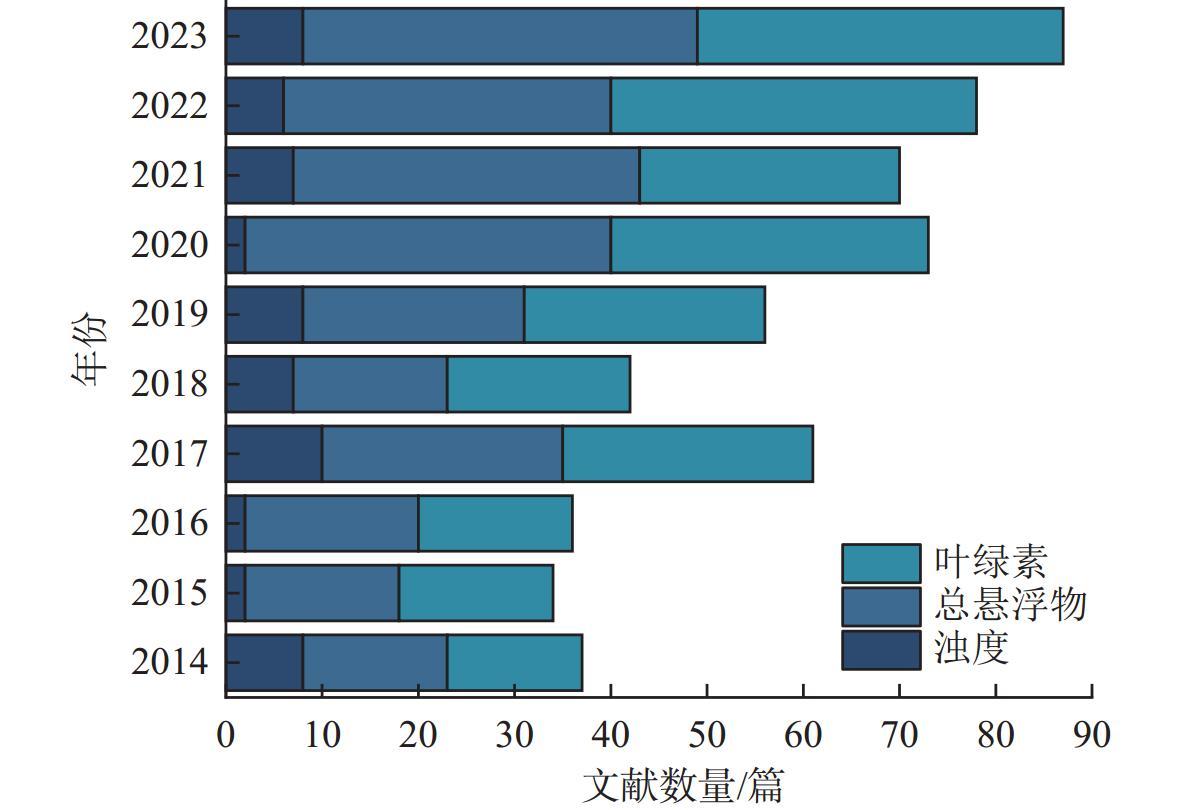
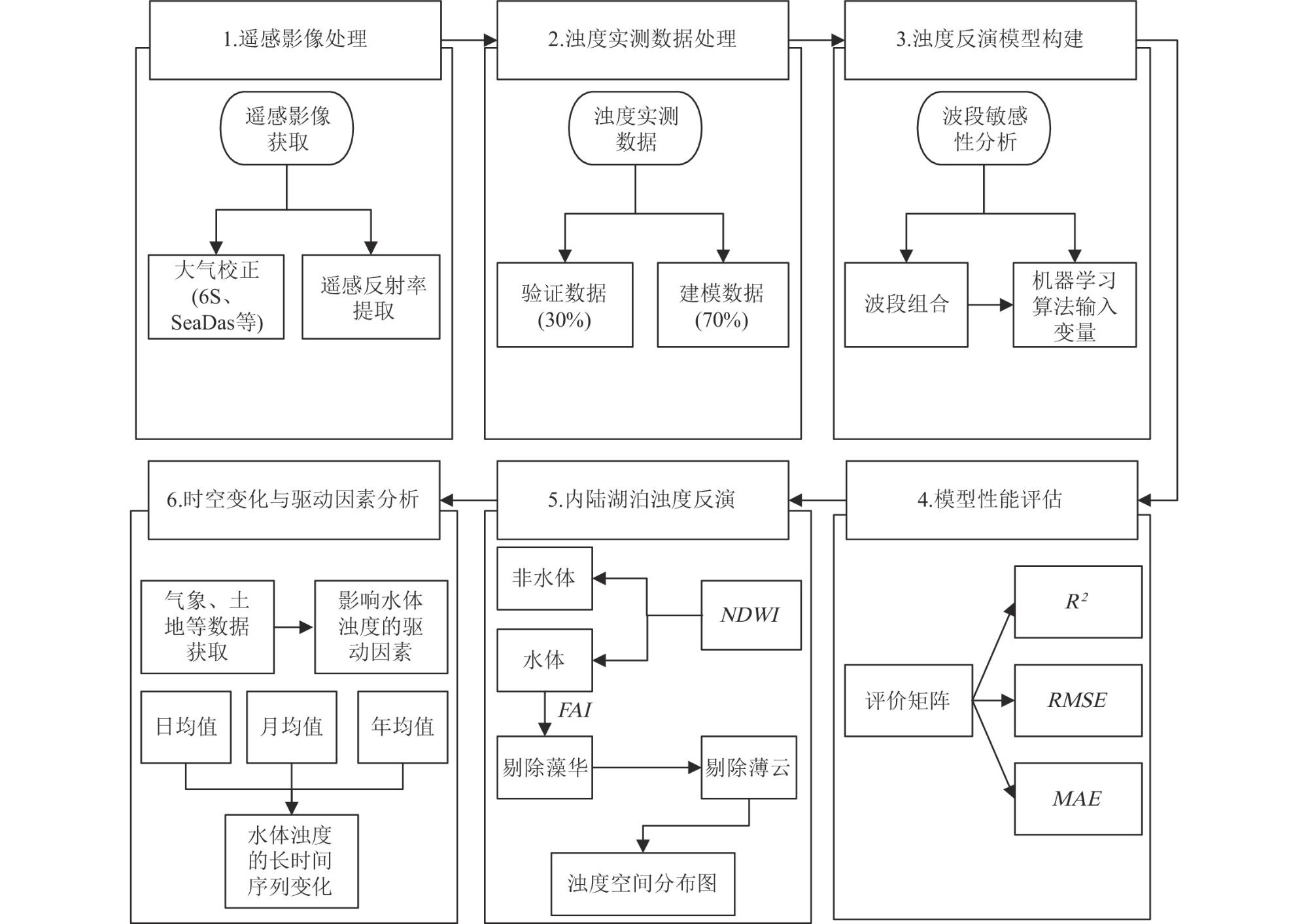
浊度作为衡量水体中悬浮物质(有机/无机颗粒物、浮游生物、微生物等)对光散射与吸收作用的关键光学参数,是水质评价的核心指标之一。近年来,随着内陆水体污染事件频发(如尾矿泄漏、水库浊流异常排放等),对高效水质监测技术的需求日益迫切。传统浊度监测依赖地面采样与实验室分析,存在时空分辨率低、成本高昂等局限性,而遥感技术具有大范围、周期性的观测优势,通过卫星/航空平台获取的多光谱数据实现浊度定量反演,已成为当前研究的热点领域。基于Web of Science数据库的文献计量分析(共574篇文献)显示,浊度遥感反演研究呈显著增长趋势,数据源呈多元化发展。主流卫星传感器包括Landsat系列(凭借30 m的空间分辨率及40余年的历史数据成为最常用的数据源)、MODIS (适用于大范围监测)、MERIS (专设水色波段)以及Sentinel-2 MSI/Sentinel-3 OLCI (兼顾空间与光谱分辨率)。在算法发展方面,已有研究已从早期的线性/多项式回归模型逐步演进为多方法体系:经验模型(单波段阈值法、波段比值法等)、半分析模型以及基于机器学习的智能算法。值得注意的是,内陆水体的光学复杂性(如不同组分对光的异质性吸收−散射效应)仍是制约反演精度的关键挑战。未来研究应聚焦于多源遥感数据融合技术以突破时空分辨率限制,大气校正模型优化以消除气溶胶干扰,基于水体光学分类的差异化建模策略,从而全面提升浊度反演的精度与鲁棒性。
李洋 , 刘阁 , 李思佳 , 宋开山 . 内陆水体浊度遥感监测研究进展与未来趋势[J]. 湿地科学, 2025 , 23(4) : 834 -845 . DOI: 10.13248/j.cnki.wetlandsci.20240067
Turbidity, as a key optical parameter measuring the scattering and absorption of light by suspended substances (including organic/inorganic particles, phytoplankton, and microorganisms), is one of the core indicators in water quality assessment. In recent years, frequent pollution events in inland water bodies, such as tailings leakage, abnormal turbidity discharges from reservoirs, and industrial runoff, have heightened the need for efficient and accurate water quality monitoring technologies. Traditional turbidity monitoring methods rely on field sampling and laboratory analysis. Although these techniques provide high-accuracy results, they are inherently limited in spatial coverage and temporal frequency, while also being labor-intensive and time-consuming. With the advancement of remote sensing technology, the acquisition of multispectral data via satellite or aerial platforms has emerged as a promising and cost-effective approach for large-scale and periodic turbidity retrieval. Remote sensing-based turbidity estimation offers several advantages, including wide-area coverage, temporal consistency, and the ability to monitor inaccessible regions. A bibliometric analysis of 574 relevant research articles indexed in the Web of Science reveals a clear upward trend in the number of turbidity-related remote sensing studies. Moreover, the diversity of satellite data sources continues to expand. Among them, the Landsat series stands out as the most commonly used due to its 30 m spatial resolution and extensive historical archive spanning over four decades. Other widely adopted sensors include MODIS (Moderate Resolution Imaging Spectroradiometer), which is suited for large-scale observations; MERIS (Medium Resolution Imaging Spectrometer), known for its ocean color-specific spectral bands; and Sentinel-2 MSI and Sentinel-3 OLCI, which strike a balance between spatial and spectral resolution. In terms of retrieval methodologies, early studies primarily employed linear or polynomial regression models. Over time, more sophisticated approaches have emerged, forming a diverse methodological framework. These include empirical models such as single-band threshold methods and band ratio algorithms, semi-analytical models that incorporate water optical properties, and data-driven machine learning algorithms that offer improved flexibility and adaptability. However, accurately estimating turbidity in optically complex inland waters remains a challenge, primarily due to the heterogeneous absorption and scattering effects of different water constituents. Looking forward, future research should prioritize three key directions: integrating multi-source remote sensing data to overcome limitations in spatial and temporal resolution; improving atmospheric correction algorithms to effectively eliminate interference from aerosols and atmospheric particles; and developing classification-based retrieval frameworks that account for the variability of water optical properties across different inland water types. These efforts will collectively enhance the accuracy, robustness, and general applicability of turbidity remote sensing in complex inland aquatic environments.
2 Number of remote sensing retrieval-related publications from 2014 to 2023 in the Web of Science Core Collection, retrieved and screened using the keywords turbidity, chlorophyll and total suspended matter2014年2月—2023年3月Web of Science核心合集以turbidity、chlorophyll、total suspended matter等关键词检索并筛选的遥感反演相关文献数量统计 |
1 Comparison and analysis of turbidity measurement methods浊度测定方法对比分析 |
| 测定方法 | 适宜测量范围 | 测量精度 | 应用范围 | 缺点 |
| 透射法 | 较高浓度 | 较低 | 基层单位 | 精度低 |
| 散射法 | 低浓度 | 低浓度比较精准 | 饮用水 | 容易污染 |
| 散射光−透射光法 | 区域范围局限性 | 较高浓度比较精准 | 颜色差异较明显 | 价格昂贵 |
| 表面散射法 | 较高浓度 | 较高浓度比较精准 | 实时分析 | 价格昂贵 |
| 水下散射法 | 较高浓度 | 较高浓度比较精准 | 实时监测 | 操作复杂 |
| 调制光强法 | 较高浓度 | 较高浓度比较精准 | 消除其他光干扰 | 初步阶段 |
2 Domestic and foreign turbidity measurement datasets国内外浊度实测数据集 |
3 Overview of water color remote sensing satellites launched between 1978 and 20231978—2023年水色卫星汇总 |
| 卫星数据名称 | 光谱分辨率 | 空间分辨率/m | 时间分辨率/d | 辐射分辨率/bit | 发射年份 |
| 注:−表示无数据。 | |||||
| CZCS | 6个波段 | 825 | 1 | − | 1978 |
| SPOT系列 | 4个波段 | 10、20 | 26 | 8、11 | 1986 |
| SeaWIFS | 8个波段 | 1 100 | 1 | 12 | 1997 |
| IKONOS | 4个波段 | 4 | 1~3 | 11 | 1999 |
| MODIS_TERRA | 36个波段 | 250、500、1 000 | 1~2 | 12 | 1999 |
| Landsat7_ETM+ | 8个波段 | 15、30、60 | 16 | 8 | 1999 |
| Quick-BIRD | 4个波段 | 0.61、2.44 | 1~3 | 11 | 2001 |
| MODIS_AQUA | 36个波段 | 250、500、1 000 | 1~2 | 12 | 2002 |
| MERIS | 15个波段 | 300 | 3 | 12 | 2002 |
| IRS-P6 | 4个波段 | 5.8、23.5、56.0 | 5 | 10 | 2003 |
| World-View | 4个波段 | 0.31~1.24 | 1~3 | 11 | 2007 |
| HJ-1A | 4个波段 | 30 | 4 | 8~10 | 2008 |
| GOCI | 8个波段 | 500 | 8景/d | 10 | 2010 |
| VIIRS | 22个波段 | 375、750 | 6景/d | 12 | 2011 |
| GF | 4个波段 | 0.8~8.0 | 1~7 | 10 | 2013 |
| Landsat8_OLI | 9个波段 | 30 | 16 | 12 | 2013 |
| Sentinel2_MSI | 13个波段 | 10、20、60 | 5 | 12 | 2015 |
| Sentinel3_OLCI | 21个波段 | 300 | 1 | 12 | 2016 |
| FY-4A | 14个波段 | 250、1 000 | 15 min | 12 | 2016 |
| FY-3D | 20个东段 | 250、1 000 | 1 | 12 | 2017 |
| NOAA-20 VIIRS | 22个波段 | 375 | 1 | 12 | 2017 |
| HY-1C | 10个波段 | 50 | 1~3 | 12 | 2018 |
| HY-1D | 10个波段 | 50 | 1~3 | 12 | 2020 |
| GOCI II | 12个波段 | 250 | 1天10景 | − | 2020 |
| FY-3E | 7个波段 | 250、1 000 | 5 | 12 | 2021 |
| FY-4B | 14个波段 | 250、1 000 | 15 min | 2 | 2021 |
| NOAA-21 VIIRS | 22个波段 | 375 | 1 | 12 | 2021 |
| FY-3G | 20个波段 | 250、1 000 | 1 | 12 | 2023 |
| HY-1E | 18个波段 | 100 | 1~3 | 14 | 2023 |
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}