
基于数字测绘的古典园林图纸智能识别与提取——以网师园殿春簃为例
|
张甜甜/女/博士/苏州大学金螳螂建筑学院讲师/研究方向为风景园林理论与历史 |
|
谢宸/男/苏州大学金螳螂建筑学院在读硕士研究生/研究方向为风景园林遗产保护 |
|
连泽峰/男/博士/苏州科技大学建筑与城市规划学院讲师/研究方向为风景园林规划与设计 |
Copy editor: 王一兰
收稿日期: 2025-07-24
修回日期: 2025-10-23
网络出版日期: 2025-12-26
基金资助
江苏省社会科学基金“江南园林历史情境可视化与多模态交互设计研究”(24YSC007)
版权
Intelligent Recognition and Extraction of Classical Garden Drawings Based on Digital Surveying and Mapping: A Case Study of the Peony Courtyard in the Master-of-Nets Garden
|
ZHANG Tiantian, Ph.D., is a lecturer in the Golden Mantis School of Architecture, Soochow University. Her research focuses on history and theory of landscape architecture. |
|
XIE Chen is a master student in the Golden Mantis School of Architecture, Soochow University. His research focuses on history and theory of landscape architecture. |
|
LIAN Zefeng, Ph.D., is a lecturer in the School of Architecture and Urban Planning, Suzhou University of Science and Technology. His research focuses on landscape planning and design |
Received date: 2025-07-24
Revised date: 2025-10-23
Online published: 2025-12-26
Copyright
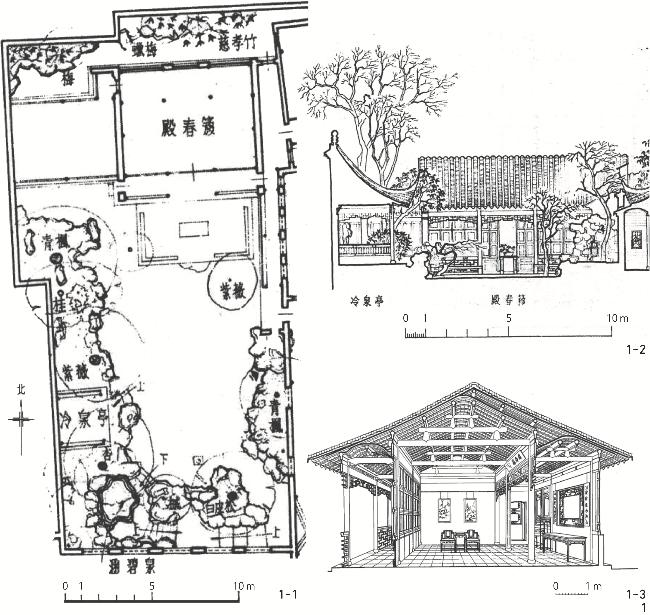
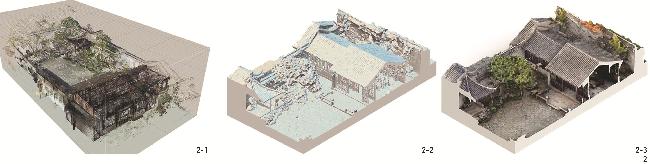
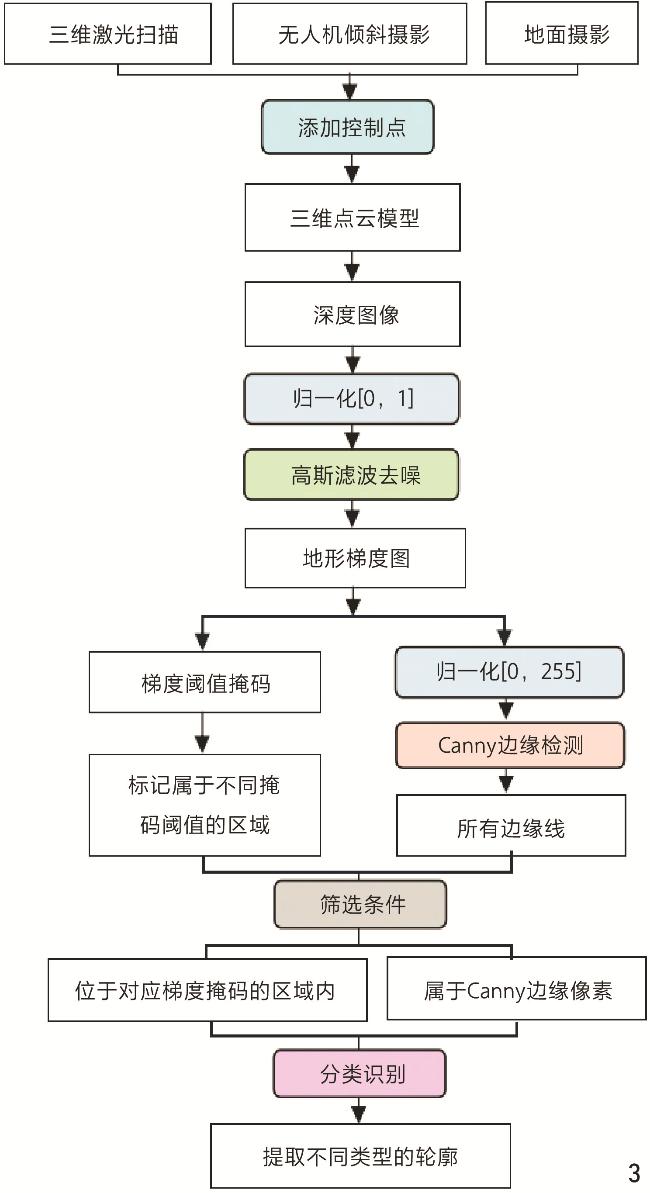
【目的】以网师园殿春簃为例,探索基于数字测绘技术的古典园林图纸智能识别与提取方法,生成高精度、可回溯的二维图纸,为园林遗产实录与保护利用提供技术支持。【方法】基于多源数据构建高精度三维点云模型,评估误差率低于1%。裁切三维点云模型至目标截面或立面,生成深度图像,利用梯度运算与Canny边缘检测算法自动提取各要素的特征线,通过梯度阈值掩码实现多层级轮廓线分层(粗、中、细线)。【结果】多源数据生成的三维点云模型与图纸精度优于传统测绘,能清晰识别建筑曲线、假山纹理等细节,揭示了现状与历史图纸的差异。三维点云模型支持任意视角出图,具备动态更新潜力。【结论】研究结果验证了数字测绘与智能算法在古典园林制图中的可行性。未来可结合人工智能技术提升自动化程度,进一步推动古典园林遗产保护从数字实录到智能解析的突破。
张甜甜 , 谢宸 , 连泽峰 . 基于数字测绘的古典园林图纸智能识别与提取——以网师园殿春簃为例[J]. 风景园林, 2025 , 32(12) : 67 -75 . DOI: 10.3724/j.fjyl.LA20250447
[Objective] This research addresses critical challenges in the documentation and research of classical Chinese gardens. As exemplary representatives of the World Cultural Heritage, Suzhou classical gardens are renowned for their intricate spatial compositions and profound cultural significance. However, current teaching and research predominantly rely on manual surveying and mapping data from the last century, such as the maps included in Liu Dunzhen’s publication, which no longer accurately reflect the current conditions. This research takes the Master-of-Nets Garden as an example, whose spatial layout has undergone multiple modifications, including the restoration of the Peony Courtyard in 2003, making it significantly different from what it is in existing maps. Traditional manual surveying methods are typically inefficient and subjective, particularly when documenting complex the morphological features such as rockery textures and architectural curves. Therefore, this research innovatively integrates modern digital surveying technologies, including 3D laser scanning and photogrammetry with intelligent image processing algorithms, such as the Canny edge detection and gradient analysis, to develop a comprehensive methodology for automated feature recognition and 2D drawing generation. Based on the case study of the Peony Courtyard, this research establishes a high-precision 3D point cloud model, aiming to provide reliable technical support and scientific basis for garden heritage conservation, academic research, and professional education, while addressing the critical limitation of historical maps in dynamically reflecting garden evolution.
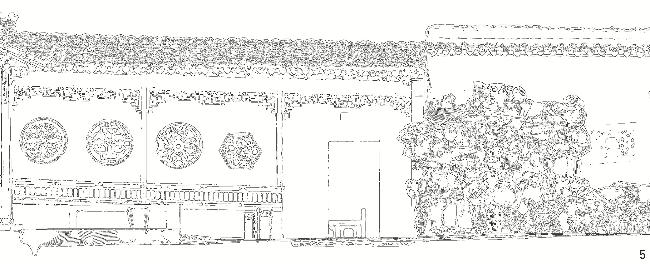
[Methods] This research adopts a multi-source data fusion approach, systematically integrating three advanced surveying techniques. During the data acquisition stage, terrestrial photogrammetry is first employed using a GPS-equipped Nikon Z5 camera to capture 1,675 high-quality images under controlled conditions at fixed daily time slots, with the overlapping area between consecutive images exceeding 70%, comprehensively covering traditionally difficult-to-document concealed areas including interior spaces, eaves, and rockery caves. Secondly, oblique aerial photography is conducted using a DJI Mavic 2 Pro drone along five designed flight paths (one nadir and four oblique routes) capturing 188 georeferenced aerial images. Thirdly, the FARO Focus S350 3D laser scanner is deployed at 26 locations to capture high-precision data of complex morphological features such as building facades and rockeries. During the data processing stage, RealityCapture is used to integrate multi-source data, constructing a 3D point cloud model with millimeter-level precision. It is verified through 38 on-site measurements using steel tape that the model’s overall error rate at 0.71% ± 0.13% (mean ± SD), with particularly reliable accuracy in architectural and courtyard areas. During the intelligent mapping stage, this study employs the Canny edge detection algorithm, with its optimal high and low thresholds of 4 and 2 determined through repeated trials, to extract feature lines of objects. Subsequently, this research utilizes gradient threshold masks to categorize the feature lines into three hierarchical levels: outer contours, secondary contours, and texture lines, corresponding to thick, medium, and thin lines, respectively, ultimately generating professional-level 2D plans and sections. Lastly, special elements like vegetation are optimized through manual assistance to ensure the completeness and accuracy of drawings.
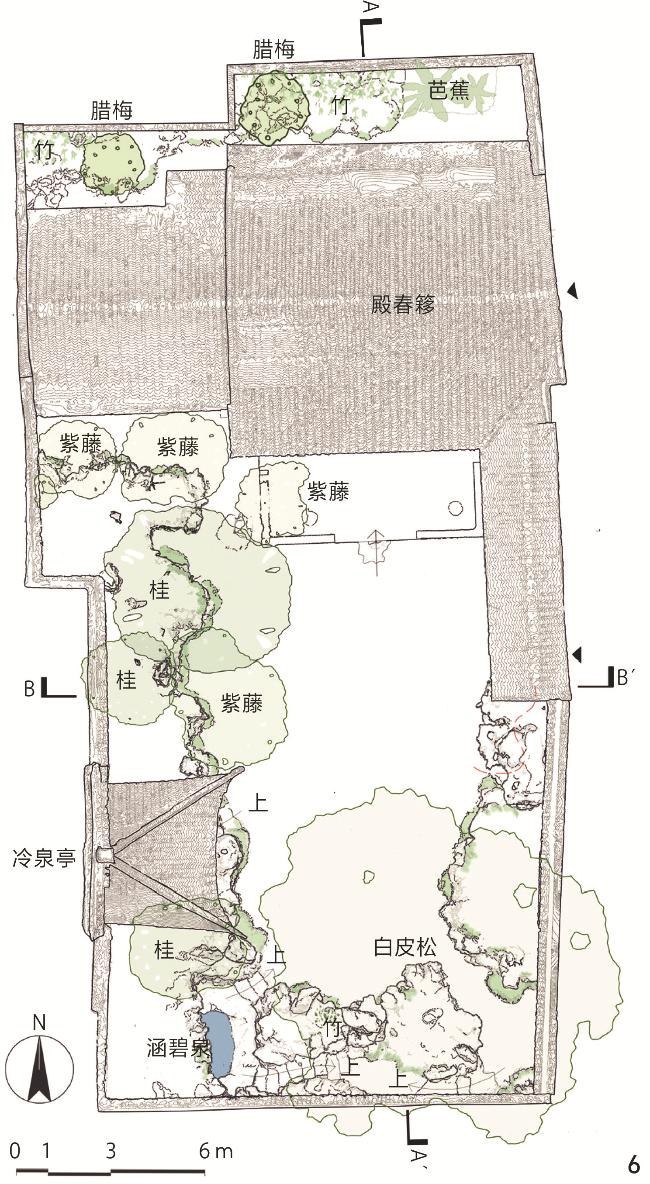
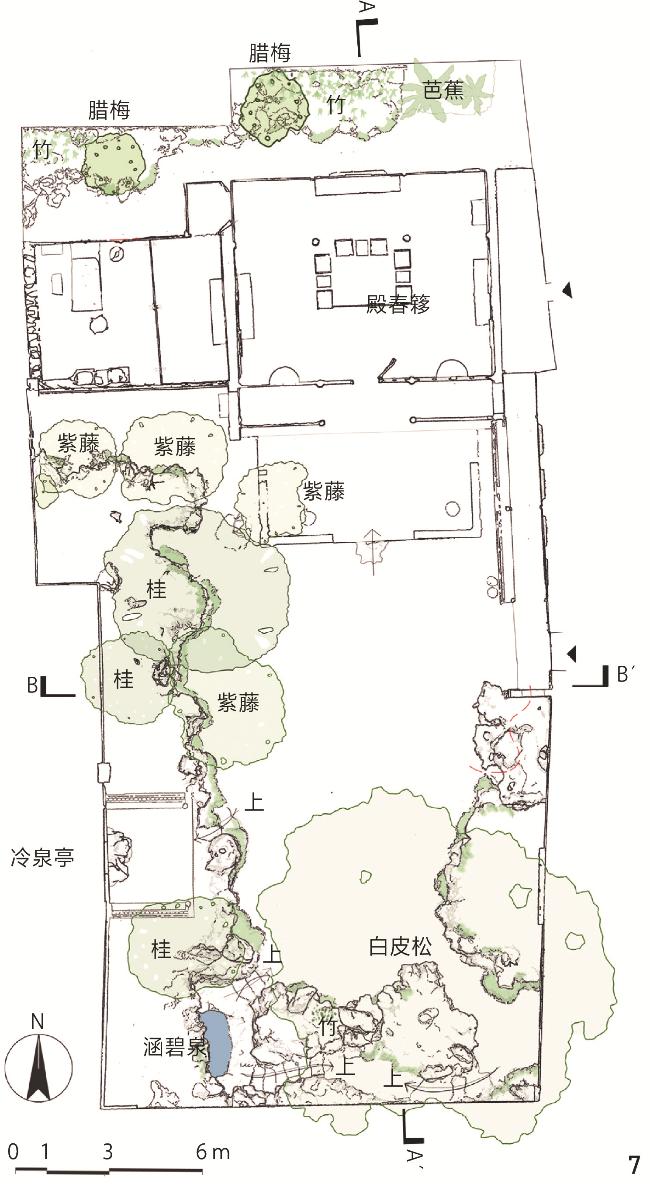
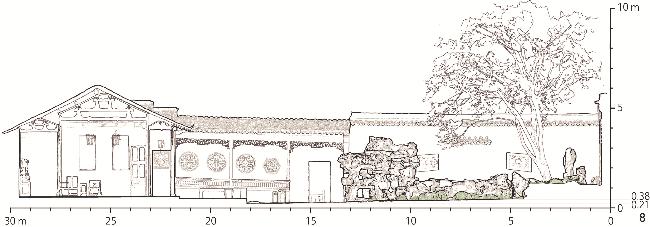
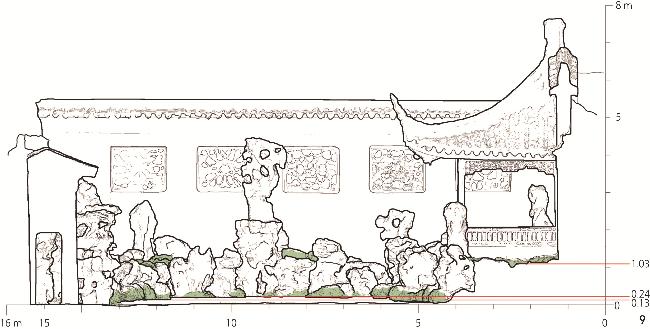
[Results] The experimental outcomes have significant advantages in multiple aspects. In terms of precision, the algorithm-generated 2D drawings maintain a stable error rate below 1%, substantially outperforming traditional manual surveying. Technically, the method successfully captures and represents subtle architectural curves and complex rockery textures that are challenging for conventional documentation. Systematic comparison with historical drawings reveals important layout modifications, such as the non-linear configuration of the Peony Courtyard’s eastern and western walls and their non-perpendicular relationship with the southern wall, with such findings corroborated by restoration photographs from the late 1950s. This research also accurately documents detailed changes including newly added rocks at the southeastern corner and morphological evolution of the steps of Hanbi Spring. Limitations include some blurred representations of interior furniture and certain windows or doors due to insufficient scanning coverage, and the need for manual parameter adjustment in complex rockery areas. Notably, the established 3D point cloud model offers comprehensive data advantages, supporting cross-sectional extraction and drawing generation from any viewpoint, overcoming the fixed-perspective limitation of traditional methods. This provides unprecedented technical possibilities for long-term monitoring and dynamic documentation of garden heritage. The entire methodology ensures professional accuracy while significantly improving efficiency, enabling multi-angle outputs from single data acquisition and greatly reducing repetitive field measurements.
[Conclusion] Through systematic technological development and empirical research, this research successfully validates the practical value of digital surveying and intelligent algorithms in the documentation and conservation of classical gardens. Technically, the research confirms the effectiveness of combining Canny edge detection with gradient threshold masking for feature extraction, establishing a complete intelligent workflow from the 3D point cloud model to 2D drawings. Regarding application value, the proposed methodology not only generates professional-level high-precision drawings, but also, through its unique traceability, enables dynamic documentation and analysis of garden evolution, providing a scientific basis for heritage monitoring and conservation decisions. Compared to traditional methods, the new technology demonstrates clear advantages in data completeness, workflow efficiency, and output accuracy, particularly excelling in documenting complex features such as rockery textures and architectural curves. Future research should focus on the following aspects: First, incorporating convolutional neural networks to enhance automated feature recognition and semantic segmentation; second, developing specialized modules for intelligent analysis of classical garden elements like rockery texture patterns and architectural components; third, establishing intelligent comparison systems between historical and current survey data for quantitative analysis of garden evolution. These innovations will advance the digital conservation of classical gardens from basic documentation to intelligent analysis, providing more robust technical support for sustainable cultural heritage conservation. The research outcomes are applicable not only to Suzhou classical gardens but can also be extended to other types of cultural heritage conservation practices, demonstrating broad application prospects and significant academic value.
表1 网师园及殿春簃图纸的主要版本Tab. 1 Main drawing versions of the Master-of-Nets Garden and the Peony Courtyard |
| 版本 | 网师园及殿春簃图纸类型、数量 | 备注 | |
|---|---|---|---|
| 1 | 《江南园林志》(1937年童寯考察绘制) | 总平面图1张(不全) | |
| 2 | 《苏州旧住宅》(1957年陈从周调查测绘) | 总平面图1张、屋顶平面图1张、剖面图2张 | |
| 3 | 《苏州古典园林》(1960年左右刘敦桢组织测绘) | 总平面图1张、剖面图2张 | |
| 4 | 《中国古典园林分析》(1986年彭一刚出版) | 总平面图1张(不全)、屋顶平面图1张 (不全) | 在《苏州古典园林》基础上绘制 |
| 5 | 《苏州园林》(1999年苏州园林设计院出版) | 总平面图1张、剖面图2张(殿春簃建筑内装修立面1张、东西向北剖立面图1张) | |
| 6 | 《江南园林图录》(刘先觉、潘谷西2007年出版) | 小山丛桂轩前院局部平面1张及剖面3张(殿春簃建筑及南北局部庭院平面图1张、南立面图1张、建筑剖透视1张) | |
| 7 | 《江南理景艺术》(2001年潘谷西出版) | 总平面图1张 | 摹自《苏州古典园林》 |
| 8 | 《中国古建筑测绘大系·园林建筑 江南园林》(2021年东南大学建筑学院出版) | 总平面图1张、剖面图2张;局部平面图4张、剖立面图11张(殿春簃建筑及南北局部庭院平面图1张、南立面图1张、建筑剖透视1张) | 辑录《苏州古典园林》《江南园林图录》《江南理景艺术》 |
| 9 | 《江南园林论》(2011年杨鸿勋出版) | 总平面图1张 | 引用《苏州古典园林》 |
| 10 | 《苏州园林史》(2023年苏州园林设计院股份有限公司出版) | 总平面图1张 | 基于《苏州古典园林》更新 |
表2 殿春簃三维模型误差分析Tab. 2 Error analysis of the Peony Courtyard’s 3D model |
| 空间类型 | 误差对比组数 | 误差最大值/cm(对应的测量值/cm) | 误差最小值/cm(对应的测量值/cm) |
|---|---|---|---|
| 庭院(露天) | 10 | 2.35(655.0) | 0.29(323.0) |
| 庭院东侧长廊 | 4 | 2.90(232.5) | 0.20(88.5) |
| 庭院南侧假山 | 15 | 3.89(88.0) | 0.03(39.0) |
| 建筑室内 | 8 | 2.70(609.0) | 0.10(437.0) |
表3 3种边缘检测方法的原理与对比Tab. 3 Principles and comparisons of three edge detection methods |
| 方法 | 原理 | 优缺点 | 适用场景 |
|---|---|---|---|
| 梯度检测法 | 通过计算模型的几何梯度(如深度、曲率的变化率)来检测轮廓 | 计算简单,可结合多种梯度特征进行检测;但对噪点较敏感,需预先体素化且可能会导致细节丢失,对渐变边缘(如曲面)检测效果差 | 适合建筑物和需要检测水平方向轮廓的物体 |
| 等高线叠加法 | 在三维模型的不同高程上切片生成各层等高线,通过等高线间高差突变判断物体轮廓 | 抗噪能力较强、可适应多尺度轮廓提取;但依赖垂直投影方向、水平方向轮廓可能遗漏、多尺度提取时计算量大 | 适合地形、建筑等垂向结构明显的场景 |
| 面法线夹角法 | 通过点云模型中相邻三角面片的法线夹角检测几何不连续边缘(硬边)作为轮廓 | 精度高、能较好地反映物体表面的连续性;但对噪点较敏感、无法检测曲面渐变轮廓,对算力要求较高 | 适合高精度硬边检测 |
表4 梯度掩码要素与取值范围Tab. 4 Gradient mask features and their value range |
| 图纸类型 | 外轮廓线 | 次级轮廓线 | 要素线 | |||||
|---|---|---|---|---|---|---|---|---|
| 读取要素(Gmin) | 取值范围 | 读取要素(Gmin) | 取值范围 | 读取要素(Gmax) | 取值范围 | |||
| 屋顶平面图、一层 平面图 | 屋顶(1 660)、院墙(687)、建筑墙体(718)、峰石(343)、花坛(82) | ≥80 | 台阶踏步(68)、叠石的石块(35)、地被(21) | [20,80) | 石块皱褶(19)、地被纹理(17)、盖瓦表面(14) | <20 | ||
| 剖立面图 | 墙体(525)、台阶(154)、峰石(1 148)、山洞(357)、花坛(184) | ≥150 | 窗洞(42)、檐瓦(41)、假山内部石块(61) | [40,150) | 石块的表面纹理皱褶(38)、地被纹理(32) | <40 | ||
1、综合多源数据构建古典园林三维点云模型,具有2个优点:1)三维激光点云模型将误差降至毫米级;2)无人机倾斜摄影与地面相机摄影照片补充物体表面纹理细节,大幅度提升模型精度。
2、利用深度图和Canny边缘检测获取高精度特征线、利用梯度阈值掩码识别并提取不同层级轮廓线以智能化输出二维图纸,具备高度灵活性和客观性,且精度高、可读性强。
| [1] |
陈大林, 汪长根, 蒋忠友, 等 苏州园林品牌价值研究[J]. 中国园林, 2018, 34 (1): 35.-39.
CHEN D L, WANG C G, JIANG Z Y, et al Academic Research of the Brand Value of Suzhou Gardens[J]. Chinese Landscape Architecture, 2018, 34 (1): 35.-39.
|
| [2] |
陈薇, 贾亭立, 是霏 园林测绘近百年, 东南传承恒创新[J]. 新建筑, 2025 (2): 12.-17.
CHEN W, JIA T L, SHI F A Century of Classical Garden Surveying and Mapping, the Enduring Innovation of Southeast University[J]. New Architecture, 2025 (2): 12.-17.
|
| [3] |
张冬冬 苏州留园山水格局变迁考: 从明代后期至今[J]. 建筑学报, 2022 S1 185.-190.
ZHANG D D A Study on Changes of Hill-Water Pattern of Liu Garden in Suzhou from Late Ming Dynasty to the Present[J]. Architectural Journal, 2022 S1 185.-190.
|
| [4] |
邵星宇 明末清初江南园林“画意”布景手法探析[J]. 建筑学报, 2023 (9): 102.-108.
SHAO X Y A Study on the Method of Pictorial Scenery in Jiangnan Gardens During Late Ming and Early Qing Dynasties[J]. Architectural Journal, 2023 (9): 102.-108.
|
| [5] |
殷悦, 沈旸, 吴琛瑜 因“文”而观, 索“献”以构: 网师园再识[J]. 建筑学报, 2025 (2): 45.-53.
YIN Y, SHEN Y, WU C Y An Analysis of Gardens Based on Literature Recognizing Master-of-Nets Garden[J]. Architectural Journal, 2025 (2): 45.-53.
|
| [6] |
陈星汉, 于瀚婷, 熊若璟, 等 基于空间句法与机器学习的中国古典园林空间指征分析框架建构[J]. 风景园林, 2024, 31 (3): 123.-131.
CHEN X H, YU H T, XIONG R J, et al Construction of an Analytical Framework for Spatial Indicator of Chinese Classical Gardens Based on Space Syntax and Machine Learning[J]. Landscape Architecture, 2024, 31 (3): 123.-131.
|
| [7] |
张清海, 张山峰, 赵晨晔 基于空间句法优化的南浔近代私家园林空间特征研究[J]. 南京林业大学学报(自然科学版), 2021, 45 (6): 209.-216.
ZHANG Q H, ZHANG S F, ZHAO C Y Spatial Characteristics of Modern Private Gardens in Nanxun Based on the Optimized Space Syntax[J]. Journal of Nanjing Forestry University (Natural Sciences Edition), 2021, 45 (6): 209.-216.
|
| [8] |
张楠, 孔宇航 山水图绘中的园林模式与空间转换: 以三幅北宋立轴为例[J]. 中国园林, 2022, 38 (8): 66.-71.
ZHANG N, KONG Y H Garden Patterns and Spatial Transformation in Landscape Painting: Three Hanging Scrolls from the Northern Song Dynasty as Examples[J]. Chinese Landscape Architecture, 2022, 38 (8): 66.-71.
|
| [9] |
杨云峰, 云嘉燕, 董芊里, 等 “真境造山”理念下叠石假山营建中的种植设计[J]. 风景园林, 2023, 30 (5): 131.-138.
YANG Y F, YUN J Y, DONG Q L, ZHANG Q P Planting Design in the Construction of Stone Stacked Rockery Under the Concept of "Realistic Rockery Construction"[J]. Landscape Architecture, 2023, 30 (5): 131.-138.
|
| [10] |
石宏超, 周俭 环秀山庄与戈裕良再认识: 叠山匠师方惠眼中的环秀山庄假山技法[J]. 园林, 2022, 39 (2): 27.-33.
SHI H C, ZHOU J Recognition of the Huanxiu Villa and GE Yuliang: The Rockery Technique of the Huanxiu Villa from the Perspective of FANG Hui, the Rockery Craftsman[J]. Landscape Architecture Academic Journal, 2022, 39 (2): 27.-33.
|
| [11] |
梁洁, 陈洁萍 基于历史地形学的古典园林复原方法研究: 以16世纪无锡寄畅园为例[J]. 建筑师, 2024 (4): 107.-112.
LIANG J, CHEN J P Research on the Restoration Method of Classical Gardens Based on Historical Topography: A Case Study of the Jichang Garden in Wuxi, 16th Century[J]. The Architect, 2024 (4): 107.-112.
|
| [12] |
谭刚毅, 汤诗旷 历史建筑的测与绘[J]. 新建筑, 2025 (2): 1.
TAN G Y, TANG S K Documentation and Drawing of Historic Architecture[J]. New Architecture, 2025 (2): 1.
|
| [13] |
童寯.江南园林志[M].北京: 中国建筑工业出版社, 1963.
TONG J. Classic Chinese Gardens of Jiangnan[M]. Beijing: China Architecture & Building Press, 1963.
|
| [14] |
陈从周.苏州旧住宅[M].上海: 上海三联书店, 2003.
CHEN C Z. Traditional Suzhou Dwellings[M]. Shanghai: Shanghai Joint Publishing Company, 2003.
|
| [15] |
刘敦桢.苏州古典园林[M].北京: 中国建筑工业出版社, 1979.
LIU D Z. Classical Gardens of Suzhou[M]. Beijing: China Architecture & Building Press, 1979.
|
| [16] |
苏州市园林和绿化管理局.网师园志[M].上海: 文汇出版社, 2014: 178-190.
Suzhou Garden and Greening Management Bureau. The Gazetteer of the Master-of-Nets Garden[M]. Shanghai: Wenhui Press, 2014: 178-190.
|
| [17] |
喻梦哲, 林溪 基于三维激光扫描与近景摄影测量技术的古典园林池山部分测绘方法探析[J]. 风景园林, 2017 (2): 117.-122.
YU M Z, LIN X Study on the Surveying Methods Based Upon the 3D Laser Scanning and Close-Range Photogrammetry Techniques of the Rockery and Pond in the Classical Chinese Gardens[J]. Landscape Architecture, 2017 (2): 117.-122.
|
| [18] |
乔月 “空-地-人”协同构建实景三维模型: 以海棠亭为例[J]. 测绘通报, 2025 (3): 174.-177.
QIAO Y “Air-Ground-Human” Cooperate to Build a Real 3D Model: Taking Haitang Pavilion as an Example[J]. Bulletin of Surveying and Mapping, 2025 (3): 174.-177.
|
| [19] |
贾星星, 张青萍, 殷新茗, 等 基于三维数字化的扬州叠山技法研究[J]. 中国园林, 2022, 38 11 88.-93.
JIA X X, ZHANG Q P, YIN X M, et al A Study on the Rockery Techniques in Yangzhou Based on Three-Dimensional Digitization[J]. Chinese Landscape Architecture, 2022, 38 11 88.-93.
|
| [20] |
董芊里, 张青萍 基于三维点云的江南私家园林叠山皴法的识别与分析研究: 以苏州四大名园为例[J]. 中国园林, 2022, 38 10 133.-138.
DONG Q L, ZHANG Q P Recognition and Analysis of Cunfa in Jiangnan Private Gardens Based on Three-Dimensional Point Cloud: Taking Four Famous Classical Gardens in Suzhou as Examples[J]. Chinese Landscape Architecture, 2022, 38 10 133.-138.
|
| [21] |
杨晨, 韩晓蓉, 韦朝旭, 等 中国古典园林石峰审美特征定量化评价方法研究: 以豫园玉玲珑为例[J]. 古建园林技术, 2023 (3): 99.-103.
YANG C, HAN X R, WEI C X, et al Research on the Quantitative Assessment Method of Aesthetic Features of Rockeries in Chinese Classical Gardens: A Case Study of Exquisite Jade Boulder in Yuyuan Garden[J]. Traditional Chinese Architecture and Gardens, 2023 (3): 99.-103.
|
| [22] |
倪佳琦 基于三维激光扫描技术的建筑物立面测量[J]. 测绘标准化, 2022, 38 (1): 67.-70.
NI J Q Building Facade Measurement Based on 3D Laser Scanning Technology[J]. Standardization of Surveying and Mapping, 2022, 38 (1): 67.-70.
|
| [23] |
朱灵茜, 张青萍, 李卫正, 等 近百年拙政园平面测绘精度评估与研究[J]. 中国园林, 2020, 36 (4): 139.-144.
ZHU L X, ZHANG Q P, LI W Z, et al Evaluation and Research on the Precision of Plane Surveying and Mapping in the Humble Administrator’s Garden in the Past Hundred Years[J]. Chinese Landscape Architecture, 2020, 36 (4): 139.-144.
|
| [24] |
张青萍, 梁慧琳, 李卫正, 等 数字化测绘技术在私家园林中的应用研究[J]. 南京林业大学学报(自然科学版), 2018, 42 (1): 1.-6.
ZHANG Q P, LIANG H L, LI W Z, et al Research of the Application of Digital Survey Techniques in Private Garden[J]. Journal of Nanjing Forestry University (Natural Sciences Edition), 2018, 42 (1): 1.-6.
|
| [25] |
古丽圆, 古新仁, 伍斯德拉 三维数字技术在园林测绘中的应用: 以假山测绘为例[J]. 建筑学报, 2016 S1 35.-40.
GU L Y, GU X R, WOUDSTRA J The Application of Digital 3D Technology in Garden Surveys: Rockwork as a Case Study[J]. Architectural Journal, 2016 S1 35.-40.
|
| [26] |
蒋雪静, 陈洪根, 俞家勇, 等 基于激光点云的古建筑逆向三维重建方法[J]. 安徽工程大学学报, 2024, 39 (6): 28.-34.
JIANG X J, CHEN H G, YU J Y, et al Reverse 3D Reconstruction Method of Ancient Buildings Based on Laser Point Cloud[J]. Journal of Anhui Polytechnic University, 2024, 39 (6): 28.-34.
|
| [27] |
孔令惠, 陆德中, 叶飞 三维激光扫描技术在历史建筑立面测绘中的应用[J]. 测绘通报, 2022 (8): 165.-168,172.
KONG L H, LU D Z, YE F Application of 3D Laser Scanning Technology in Historic Building Facade Surveying and Mapping[J]. Bulletin of Surveying and Mapping, 2022 (8): 165.-168,172.
|
| [28] |
DOLAPSAKI M M, GEORGOPOULOS A Edge Detection in 3D Point Clouds Using Digital Images[J]. ISPRS International Journal of Geo-Information, 2021, 10 (4): 229.
|
| [29] |
ZHOU W L, FU X X, DENG Y Y, et al The Extraction of Roof Feature Lines of Traditional Chinese Village Buildings Based on UAV Dense Matching Point Clouds[J]. Buildings, 2024, 14 (4): 1180.
|
| [30] |
BRANDENBURGER W, DRAUSCHKE M, MAYER H Cornice Detection Using Façade Image and Point Cloud[J]. Photogrammetrie - Fernerkundung - Geoinformation, 2013, 2013 (5): 511.-521.
|
| [31] |
陈从周.梓翁说园[M].2版.北京: 北京出版社, 2011: 86.
CHEN C Z. Master Zi on Gardens[M]. 2nd ed. Beijing: Beijing Publishing House Group, 2011: 86.
|
| [32] |
CANNY J. A Computational Approach to Edge Detection[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1986, PAMI-8(6): 679-698.
|
| [33] |
梁玮, 裴明涛.计算机视觉[M].北京: 北京理工大学出版社, 2021: 45.
LIANG W, PEI M T. Computer Vision[M]. Beijing: Beijing Institute of Technology Press, 2021: 45.
|
| [34] |
OpenCV Tutorials. Canny Edge Detector[EB/OL].[2025-10-07]. https://docs.opencv.org/3.4/da/d5c/tutorial_canny_detector.html
|
| [35] |
茅晓伟, 周苏宁, 沈亮.史迹留痕: 苏州园林名胜旧影[M].北京: 中国水利水电出版社, 2020: 43.
MAO X W, ZHOU S N, SHEN L. Historical Traces: The Old Shadows of Suzhou Garden Scenic Spots[M]. Beijing: China Water & Power Press, 2020: 43.
|
| [36] |
姜皓然, 许章平, 相涛 多源数据融合的城市三维实景建模[J]. 测绘通报, 2025 S1 124.-127,173.
JIANG H R, XU Z P, XIANG T Urban 3D Real-Scene Modeling Supported by Multi-source Data Fusion Technology[J]. Bulletin of Surveying and Mapping, 2025 S1 124.-127,173.
|
| [37] |
HOLAIL S, SALEH T, XIAO X W, et al Edge-CVT: Edge-Informed CNN and Vision Transformer for Building Change Detection in Satellite Imagery[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2025, 227: 48.-68.
|
| [38] |
张婷, 张兴忠, 王慧民, 等 基于图神经网络的变电站场景三维目标检测[J]. 计算机工程与应用, 2023, 59 (9): 329.-336.
ZHANG T, ZHANG X Z, WANG H M, et al 3D Object Detection in Substation Scene Based on Graph Neural Network[J]. Computer Engineering and Applications, 2023, 59 (9): 329.-336.
|
| [39] |
张广运, 张荣庭, 张余, 等 复杂城市场景三维网格模型智能解译技术综述[J]. 中国图象图形学报, 2025 (6): 1808.-1827.
ZHANG G Y, ZHANG R T, ZHANG Y, et al Technology of Intelligent Interpretation of Three-Dimensional Mesh Models for Complex Urban Scenes: A Survey[J]. Journal of Image and Graphics, 2025 (6): 1808.-1827.
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}