
|
第一作者:苏铁桓,男,1997年生,在读硕士研究生,主要从事遥感影像智能处理的研究工作。E-mail:1160933784@qq.com |
收稿日期: 2025-02-14
修回日期: 2025-03-03
网络出版日期: 2025-10-24
基金资助
国家自然科学基金(41602333)
A method for extracting road attribute information from remote sensing images based on multi-task learning and its application in the periphery of nuclear power plants
|
First author:SU Tiehuan,male,born in 1997,master’s candidate,focusing on intelligent processing of remote sensing images. E-mail:1160933784@qq.com |
Received date: 2025-02-14
Revised date: 2025-03-03
Online published: 2025-10-24
Supported by
National Natural Science Foundation of China(41602333)
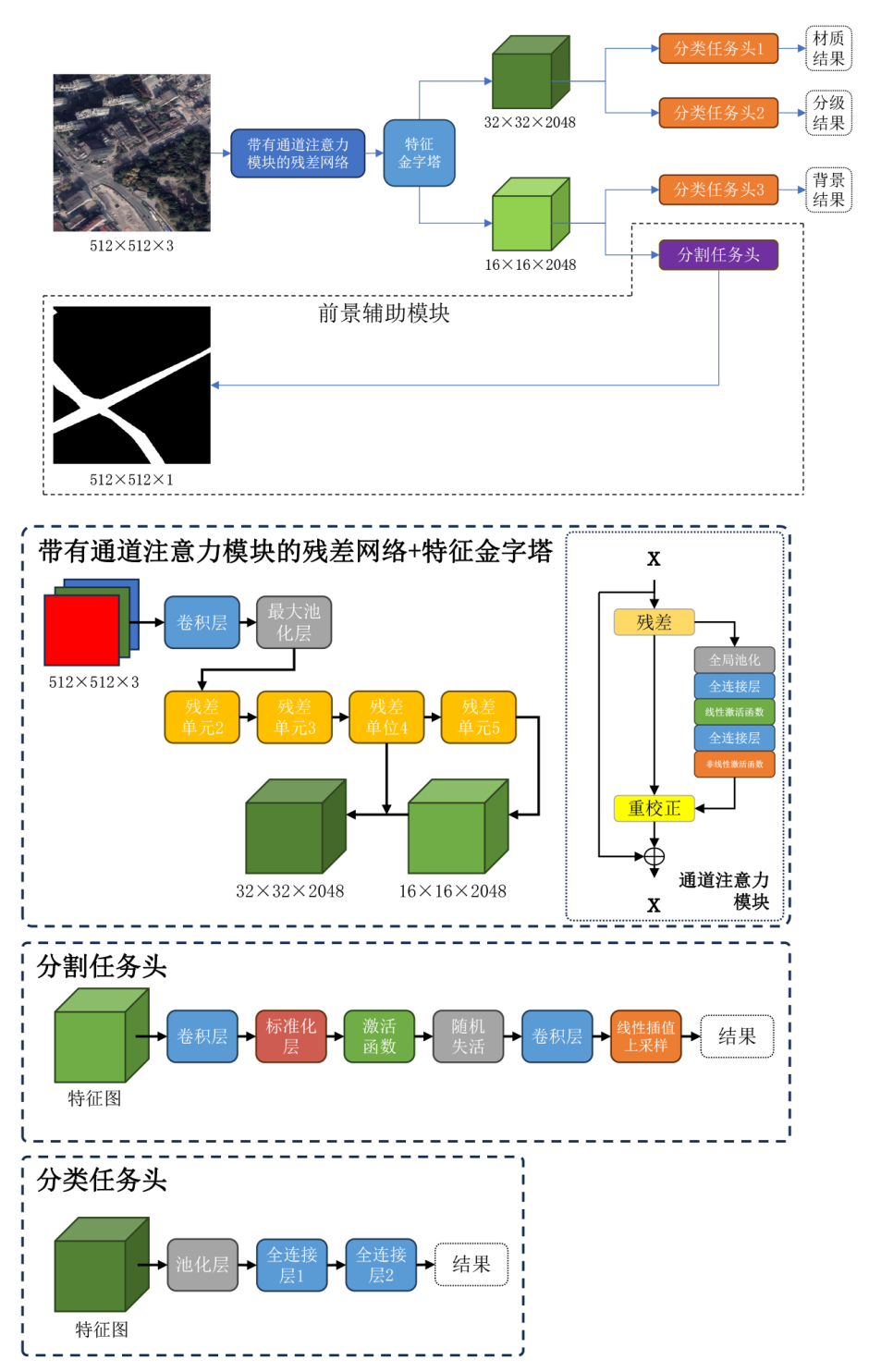
道路作为典型的人工地物目标,在遥感影像解译领域具有重要的研究价值。现有研究多聚焦于道路目标的几何提取,而对道路属性信息如路面材质、道路分级及道路周边地物类型的综合提取研究相对不足。然而,道路属性信息对于道路管理、城市规划等至关重要。考虑到上述道路属性信息,存在一定工程关系和地理关系,研究中使用多任务学习的思路。本研究提出一种基于多任务学习的可见光遥感影像道路属性提取方法,采用含通道注意力模块的残差网络作为骨干网络,并嵌入前景辅助模块与特征金字塔模块,增强对道路目标的关注及多尺度处理能力。最后研究实现了在可见光遥感影像中对道路目标的材质、分级和道路周边地物类型(背景)进行分类。该方法成功实现了对道路材质、分级和周边地物类型的分类,且在多任务学习框架下,网络整体准确度有所提升,证明卷积网络能有效提取特征并学习工程与地理关系。本研究将该方法应用于核电站周边区域,针对核电站这一重要设施及其周边复杂环境,验证方法在实际场景中的有效性,为核电站周边道路信息的精准获取提供新的技术手段,对于保障核电站安全运行及周边区域的合理规划具有重要意义。
苏铁桓 , 秦凯 , 赵英俊 , 安梓嘉 , 郝予希 . 基于多任务学习的遥感影像道路属性信息获取方法及其在核电站周边区域的应用[J]. 世界核地质科学, 2025 , 42(2) : 374 -384 . DOI: 10.3969/j.issn.1672-0636.2025.02.012
Roads,as typical man-made objects,have attracted considerable attention in the field of remote sensing. Previous research has predominantly focused on geometrical feature extraction,with relatively insufficient attention paid to road attribute information such as material, classification, and surrounding features. However,road attribute information is crucial for road management,urban planning,and more. Considering the inherent engineering and geographical relationships among these road attributes,this study adopts a multi-task learning approach. We propose a method for extracting road attributes from visible remote sensing images based on multi-task learning,utilizing a residual network integrated with a channel attention module as the backbone. This is further enhanced with a foreground auxiliary module and a feature pyramid module to augment the focus on road targets and the capability for multi-scale processing. Ultimately,the study achieves the classification of road material,classification,and surrounding feature types (background) in visible remote sensing images. and proved the overall accuracy of the network,demonstrating that convolutional networks can effectively extract features and learn engineering and geographical relationships. In the application to the periphery of a nuclear power plants,this method addressed the complex environment and strategic importance of nuclear facilities,validating its effectiveness in practical scenarios,which is of significant importance for ensuring the safe operation of nuclear power plants and the rational planning of surrounding areas.
表1 数据集样例Table 1 The samples of datasets |
| 道路遥感影像 | 分割图像 | 分类标签 |
|---|---|---|
 |  | 材质:柏油 分级:高速、干道、小径 背景:林地绿地 |
 |  | 材质:柏油 分级:干道、小径 背景:稀疏城区 |
 |  | 材质:柏油、水泥 分级:干道、小径 背景:林地绿地 |
 |  | 材质:柏油 分级:小径 背景:密集城区 |
表2 消融实验结果Table 2 The results of ablation experiment |
| 序号 | 网络结构 | 材质准确率/% | 分级准确率/% | 背景准确率/% |
|---|---|---|---|---|
| 1 | ResNet50 | 67.31 | 68.69 | 75.5 |
| 2 | SE-ResNet50 + Foreground | 67.78 | 66.73 | 72.95 |
| 3 | ResNet50 + FPN + Foreground | 69.48 | 72.1 | 73.06 |
| 4 | SE-ResNet50 + FPN | 66.41 | 63.57 | 68.84 |
| 5 | SE-ResNet50 + FPN + Foreground | 71.85 | 71.24 | 76.27 |
表3 多任务学习对比实验结果Table 3 The comparison experiment results of multi-task learning |
| 编号 | 任务 | 材质准确率/% | 分级准确率/% | 背景准确率/% |
|---|---|---|---|---|
| a | 材质 | 67.98 | - | - |
| b | 分级 | - | 71.42 | - |
| c | 背景 | - | - | 73.17 |
| d | 材质+分级 | 68.05 | 73.84 | - |
| e | 材质+分级+背景 | 71.85 | 72.1 | 76.27 |
表4 东海第二核电站区域道路属性信息提取结果展示Table 4 Extraction results of road attribute information in the Tokai Daini nuclear power plant area |
| 影像 | 真值 | 识别结果 |
|---|---|---|
| | 材质:柏油 分级:高速、干道 背景:密集城区 | 材质:柏油 分级:高速、干道 背景:密集城区 |
| | 材质:柏油、砂土 分级:干道、小径 背景:林地绿地 | 材质:柏油、砂土 分级:干道、小径 背景:林地绿地 |
| | 材质:柏油、水泥、砂土 分级:干道 背景:裸土水域 | 材质:柏油、水泥、砂土 分级:干道 背景:稀疏城区 |
| | 材质:柏油 分级:干道、小径 背景:稀疏城区 | 材质:柏油、水泥 分级:干道、小径 背景:稀疏城区 |
蓝色—检出不存在的标签;红色—检出但错误的标签;绿色—未被检出的真值。 |
表5 东海第二核电站周边区域道路属性信息提取结果对比Table 5 Comparison of the extraction results of road attribute information in the periphery of the Tokai Daini nuclear power plant |
| 方法 | 学习策略 | 准确率/% |
|---|---|---|
| 本文方法 | 多任务 | 85.01 |
| 本文方法 | 背景任务 | 89.06 |
| ResNet50 | 背景任务 | 70.31 |
| ResNet152 | 背景任务 | 73.43 |
| VGG16 | 背景任务 | 54.69 |
| VGG19 | 背景任务 | 56.25 |
| 1 |
|
| 2 |
|
| 3 |
|
| 4 |
|
| 5 |
|
| 6 |
|
| 7 |
|
| 8 |
|
| 9 |
王坤阳, 刘洋, 业宁, 等. 基于多任务学习的复杂城市遥感图像道路提取[J]. 计算机科学, 2024, 51(增刊2):418-425.
|
| 10 |
毛秀华, 张强, 阮航, 等. 多任务协同的多模态遥感目标分割算法[J]. 电子与信息学报, 2024, 46(8):3363-3371.
|
| 11 |
|
| 12 |
|
| 13 |
|
| 14 |
|
| 15 |
|
| 16 |
伊丕源, 黄树桃, 郭里, 等. 核应急遥感应用现状及“高分卫星”应用潜力分析[J]. 世界核地质科学, 2022, 39(2):296-308.
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}