
一种融合上下文语义信息与边缘特征的海陆分割方法
|
文甜甜(1997-),女,硕士研究生,研究方向为遥感影像处理。Email:1638581978@qq.com。 |
Copy editor: 陈庆
收稿日期: 2024-09-02
修回日期: 2024-11-22
网络出版日期: 2026-06-03
A sea-land segmentation method combining contextual semantic information and edge features
Received date: 2024-09-02
Revised date: 2024-11-22
Online published: 2026-06-03
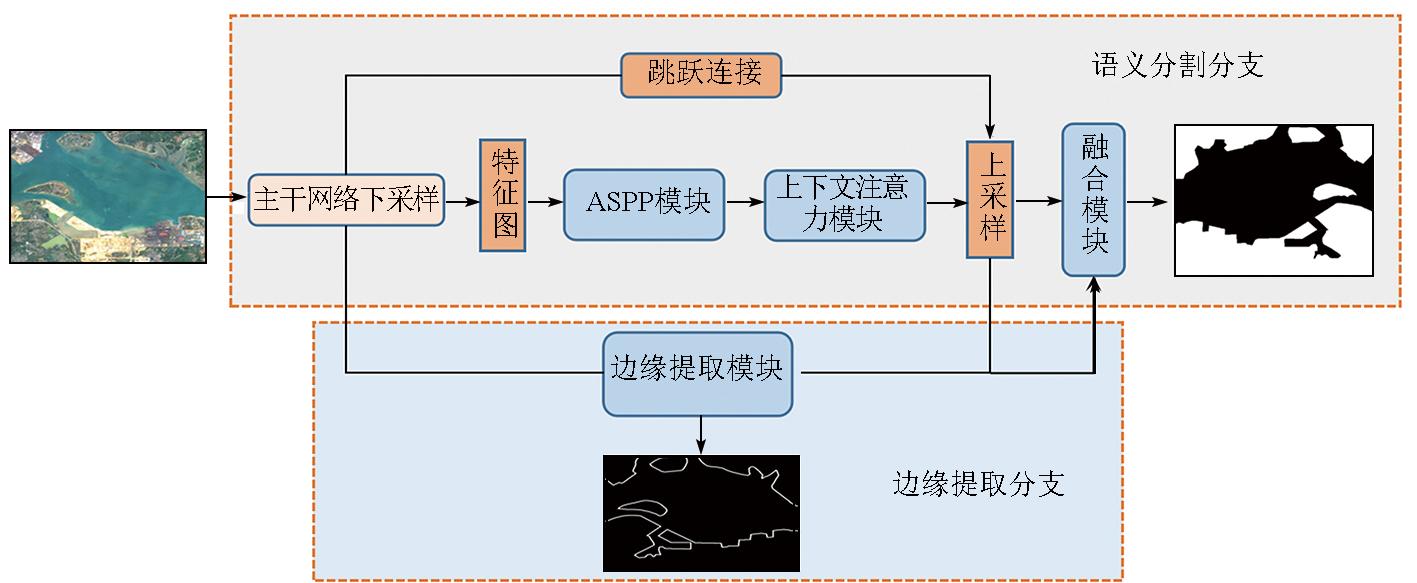
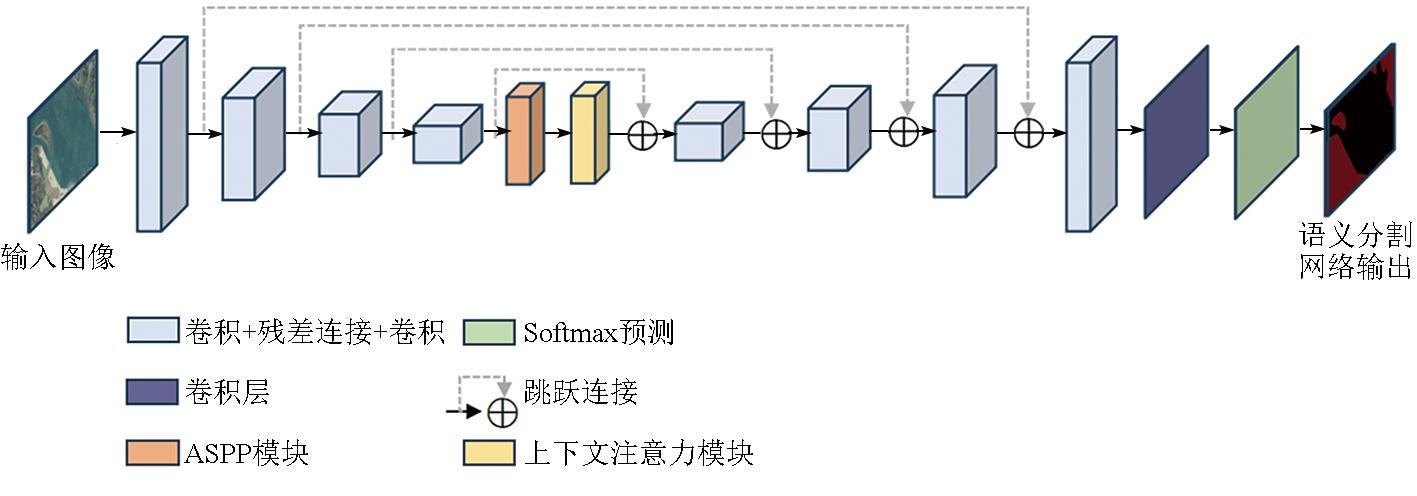
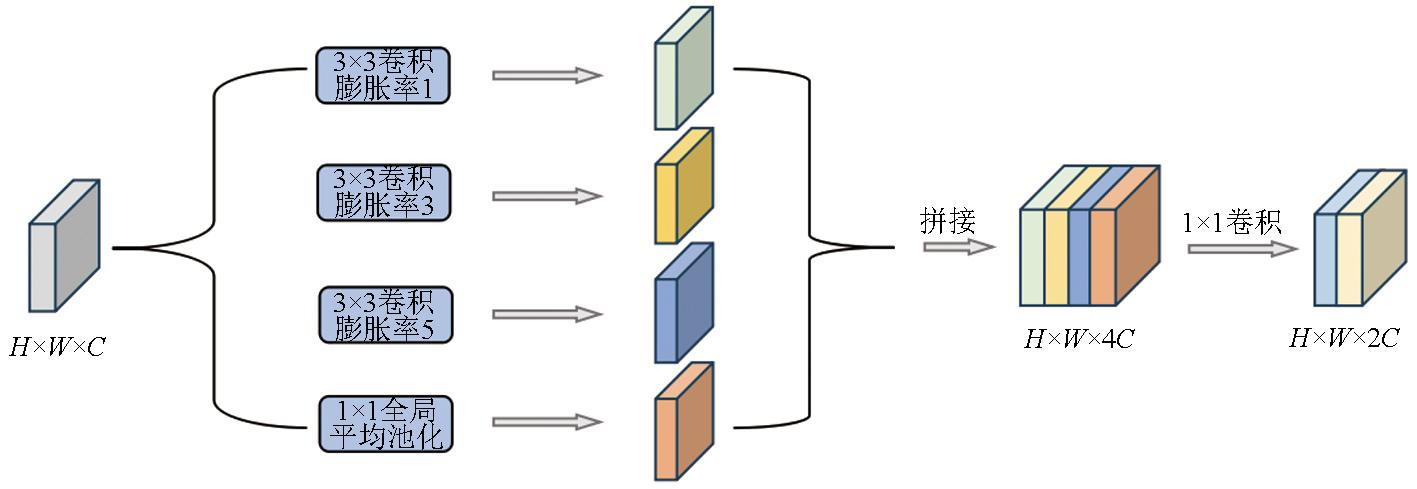
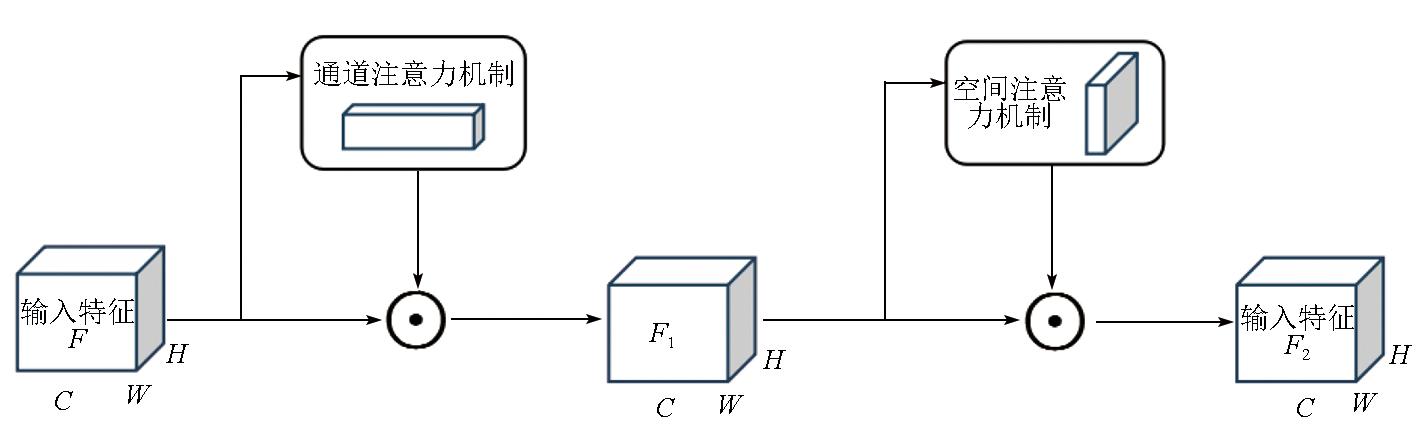
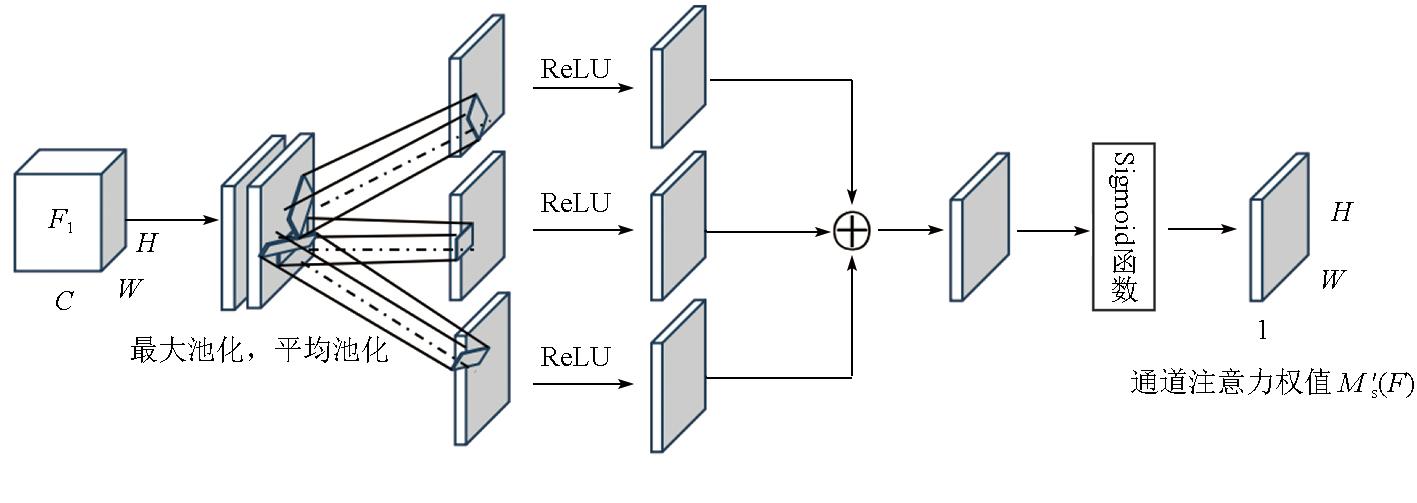
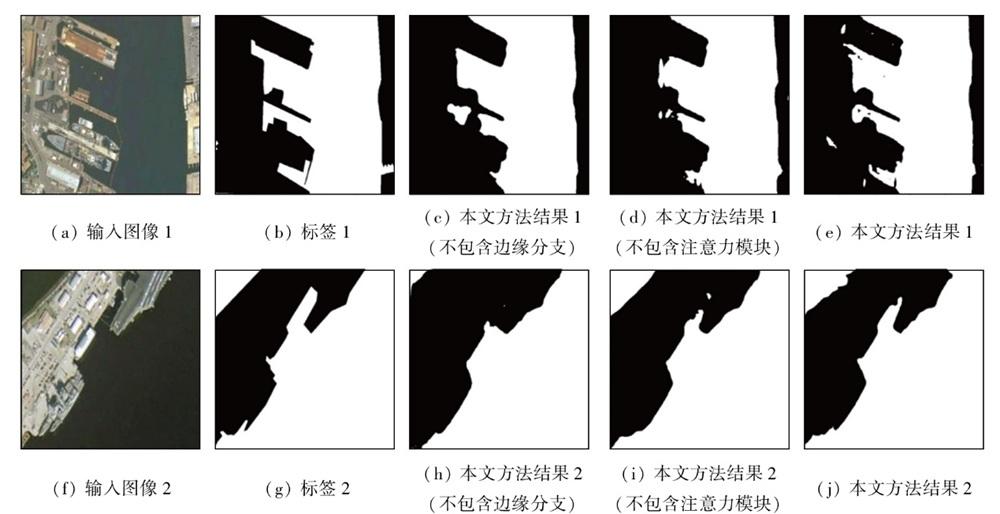
由于在环境错综复杂、地物信息丰富的光学遥感图像中进行海陆分割时会出现定位精度低和边缘模糊的问题,因此文章提出一种融合上下文语义信息与边缘特征的深度卷积网络模型与海陆分割方法。首先利用FusionNet语义分割网络模块提取遥感图像中丰富的目标语义信息;然后利用改进的空洞空间金字塔池化模块(atrous spatial pyramid pooling,ASPP)和上下文注意力模块从分割网络中提取不同尺度和层次的上下文语义特征,并构建边缘提取子网络获取多尺度边缘特征;最后通过融合模块对语义特征和边缘特征进行组合,实现海陆精准分割。在2个典型数据集上的测试结果表明,该文方法的整体预测正确率、F1分数以及边界F1分数分别达到了98.21%,97.64%,89.36%和96.09%,95.67%,86.13%,均显著优于其他对比模型。特别是在复杂背景下,该方法可有效提高分割和边缘检测的准确性,对人工岸线和港口的分割具有明显优势。
文甜甜 , 普运伟 , 赵文翔 . 一种融合上下文语义信息与边缘特征的海陆分割方法[J]. 自然资源遥感, 2025 , 37(5) : 62 -72 . DOI: 10.6046/zrzyyg.2024286
In optical remote sensing images with complex scenes and rich land cover information,the sea-land segmentation faces challenges such as low positioning accuracy and blurred edges. Therefore,this paper proposed a deep convolutional network model and a sea-land segmentation method that integrate contextual semantic information and edge features. First,the rich target semantic information was extracted from remote sensing images using the FusionNet semantic segmentation network module. Then,multi-scale and hierarchical contextual semantic features were extracted from the segmentation network using the enhanced atrous spatial pyramid pooling (ASPP) module and contextual attention module. Additionally,an edge extraction sub-network was built to extract multi-scale edge features. Finally,the semantic features and edge features were combined through a fusion module,thereby achieving accurate sea-land segmentation. This method was tested with two typical representative datasets. The results showed that this method achieved an overall prediction accuracy of 98.21%,an F1 score of 97.64%,and a boundary F1 score of 89.36%,all significantly outperforming other models. Particularly in complex backgrounds,this method can effectively improve the accuracy of segmentation and edge detection,demonstrating definite advantages in the segmentation of artificial coastlines and ports.
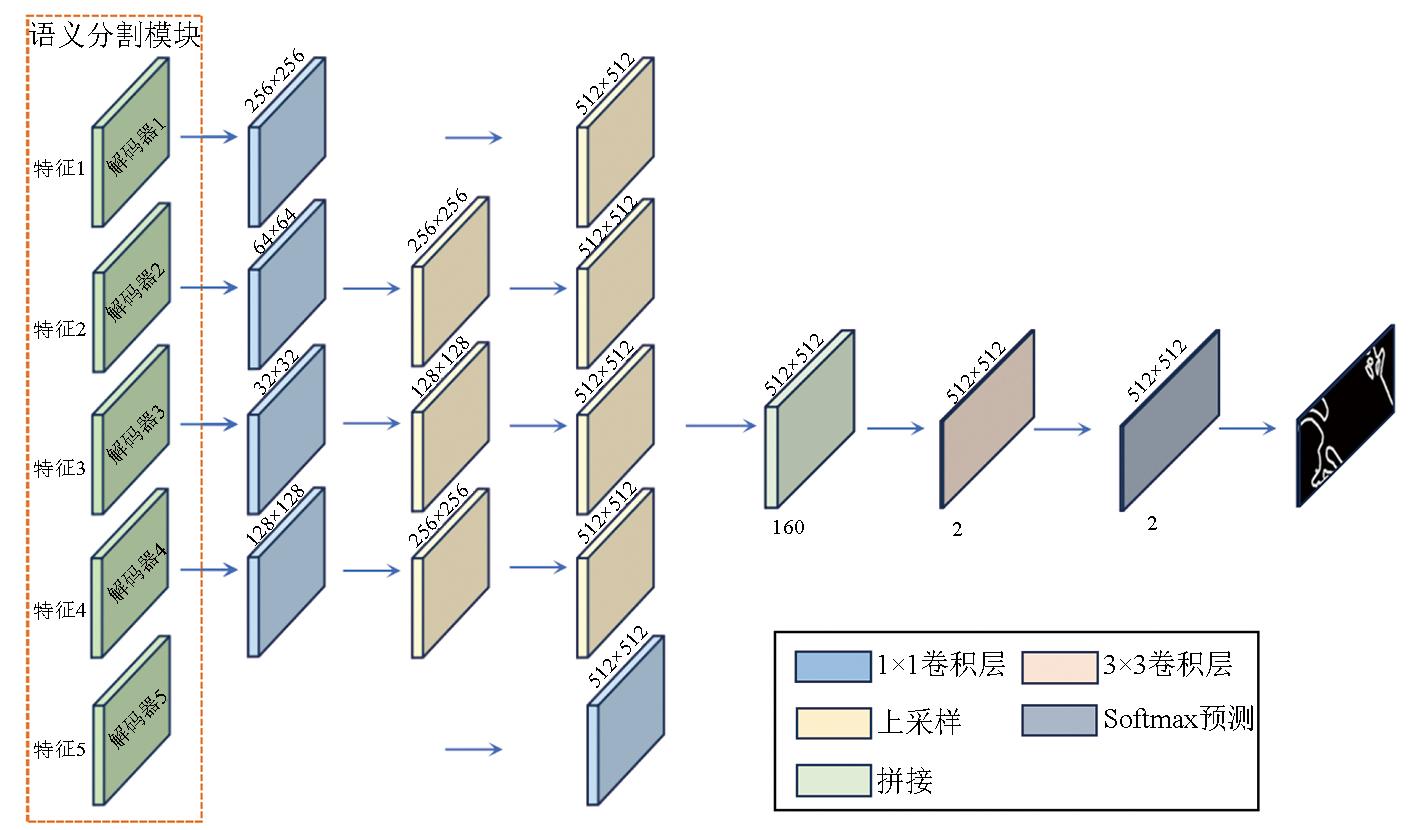
表1 边缘提取网络详细配置Tab.1 Detailed configuration of the edge extraction network |
| 特征 映射 | 名称 | 卷积核 尺寸 | 步幅 | 填充 | 输出尺寸 |
|---|---|---|---|---|---|
| 特征1 | Conv1-2 | 3×3 | 2 | 1 | 256×256×64 |
| Conv1-E | 1×1 | 1 | 0 | 256×256×32 | |
| Unpool1-E | 2×2 | 2 | 0 | 512×512×32 | |
| 特征2 | Conv3-2 | 3×3 | 2 | 1 | 64×64×256 |
| Conv2-E | 1×1 | 1 | 0 | 64×64×32 | |
| Unpool2-1-E | 2×2 | 4 | 0 | 256×256×32 | |
| Unpool2-2-E | 2×2 | 2 | 0 | 512×512×32 | |
| 特征3 | Conv4-2 | 3×3 | 1 | 1 | 32×32×512 |
| Conv3-E | 1×1 | 1 | 0 | 32×32×32 | |
| Unpool3-1-E | 2×2 | 4 | 0 | 128×128×32 | |
| Unpool3-2-E | 2×2 | 4 | 0 | 512×512×32 | |
| 特征4 | Conv3-2-D | 3×3 | 1 | 1 | 128×128×256 |
| Conv4-E | 1×1 | 1 | 0 | 128×128×32 | |
| Unpool4-1-E | 2×2 | 2 | 0 | 256×256×32 | |
| Unpool4-2-E | 2×2 | 2 | 0 | 512×512×32 | |
| 特征5 | Conv1-2-D | 3×3 | 1 | 1 | 512×512×64 |
| Conv5-E | 1×1 | 1 | 0 | 512×512×32 | |
| 拼接层 | Concat | — | — | — | 512×512×160 |
| 卷积层 | Conv-E | 3×3 | 1 | 1 | 512×512×2 |
| 预测层 | Softmax | — | — | — | 512×512×2 |
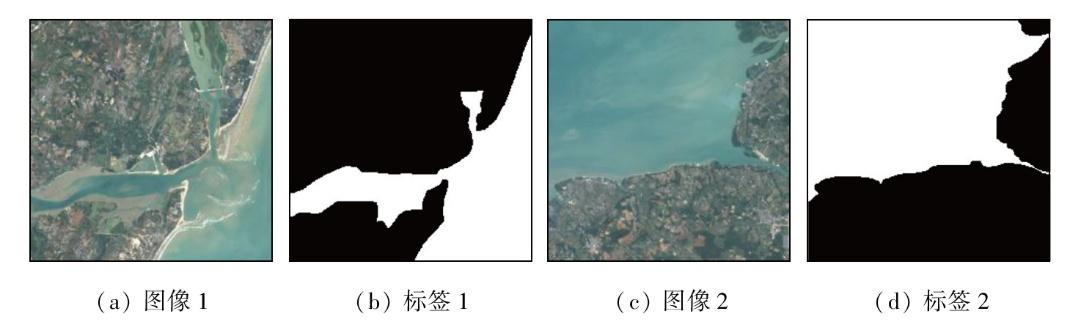
表2 不同方法在Coastline-Segmentation数据集上的分割结果Tab.2 Segmentation results of different methods on the Coastline-Segmentation dataset |
| 输入图 像编号 | 输入图像 | 标签 | U-Net | PSPNet | FusionNet | 本文方法 | 边缘提取结果 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 图像1 |  | ||||||||||||
| 图像2 |  | ||||||||||||
| 图像3 |  | ||||||||||||
| 图像4 |  | ||||||||||||
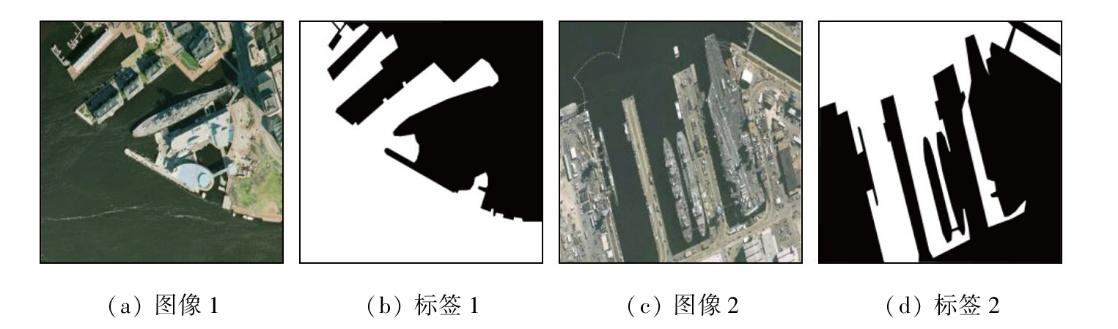
表3 不同方法在HRSC2016数据集上的分割结果Tab.3 Segmentation results of different methods on the HRSC2016 dataset |
| 输入图 像编号 | 输入图像 | 标签 | U-Net | PSPNet | FusionNet | 本文方法 | 边缘提取结果 |
|---|---|---|---|---|---|---|---|
| 图像1 |  | ||||||
| 图像2 |  | ||||||
| 图像3 |  | ||||||
| 图像4 |  | ||||||
表4 对不同网络的分割效果进行比较研究的结果Tab.4 Comparative study of segmentation performance across different networks (%) |
| 数据集 | 方法 | 交并比 | 召回率 | 正确率 | F1分数 | BR | BP | BF1 |
|---|---|---|---|---|---|---|---|---|
| Coastline-Segmentation数据集 | U-Net+Canny | 92.39 | 96.63 | 97.08 | 96.85 | 79.87 | 82.25 | 81.03 |
| PSPNet+Canny | 92.62 | 95.67 | 96.82 | 96.24 | 78.94 | 81.23 | 80.07 | |
| FusionNet+Canny | 93.22 | 96.86 | 97.71 | 97.28 | 83.21 | 85.56 | 83.20 | |
| 本文方法 | 93.14 | 97.09 | 98.21 | 97.64 | 87.10 | 91.75 | 89.36 | |
| HRSC2016数据集 | U-Net+Canny | 90.86 | 93.36 | 93.06 | 93.04 | 76.92 | 83.33 | 79.98 |
| PSPNet+Canny | 89.31 | 91.11 | 92.55 | 92.41 | 79.23 | 80.56 | 79.88 | |
| FusionNet+Canny | 90.26 | 92.95 | 94.68 | 93.28 | 81.02 | 82.54 | 81.77 | |
| 本文方法 | 93.14 | 95.26 | 96.09 | 95.67 | 84.96 | 87.32 | 86.13 |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
陈祥, 孙俊, 尹奎英, 等. 基于Otsu与海域统计特性的SAR图像海陆分割算法[J]. 数据采集与处理, 2014, 29(4):603-608.
|
| [5] |
李业钦, 王常颖, 隋毅, 等. 基于自动阈值分类的高分辨率影像海陆分界线自动提取[J]. 遥感技术与应用, 2021, 36(6):1379-1387.
|
| [6] |
梁新宇, 罗晨, 权冀川, 等. 基于深度学习的图像语义分割技术研究进展[J]. 计算机工程与应用, 2020, 56(2):18-28.
|
| [7] |
马妍, 古丽米拉·克孜尔别克. 图像语义分割方法在高分辨率遥感影像解译中的研究综述[J]. 计算机科学与探索, 2023, 17(7):1526-1548.
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
梁烽, 张瑞祥, 柴英特, 等. 一种结合上下文与边缘注意力的SAR图像海陆分割深度网络方法[J]. 武汉大学学报(信息科学版), 2023, 48(8):1286-1295.
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
杨先增, 周亚男, 张新, 等. 融合边缘特征与语义信息的人工坑塘精准提取方法[J]. 地球信息科学学报, 2022, 24(4):766-779.
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}