
Remote Sensing for Natural Resources >
A remote sensing image matching network combining a large selective kernel-enhanced convolution module
Received date: 2024-11-12
Revised date: 2025-02-12
Online published: 2026-06-03
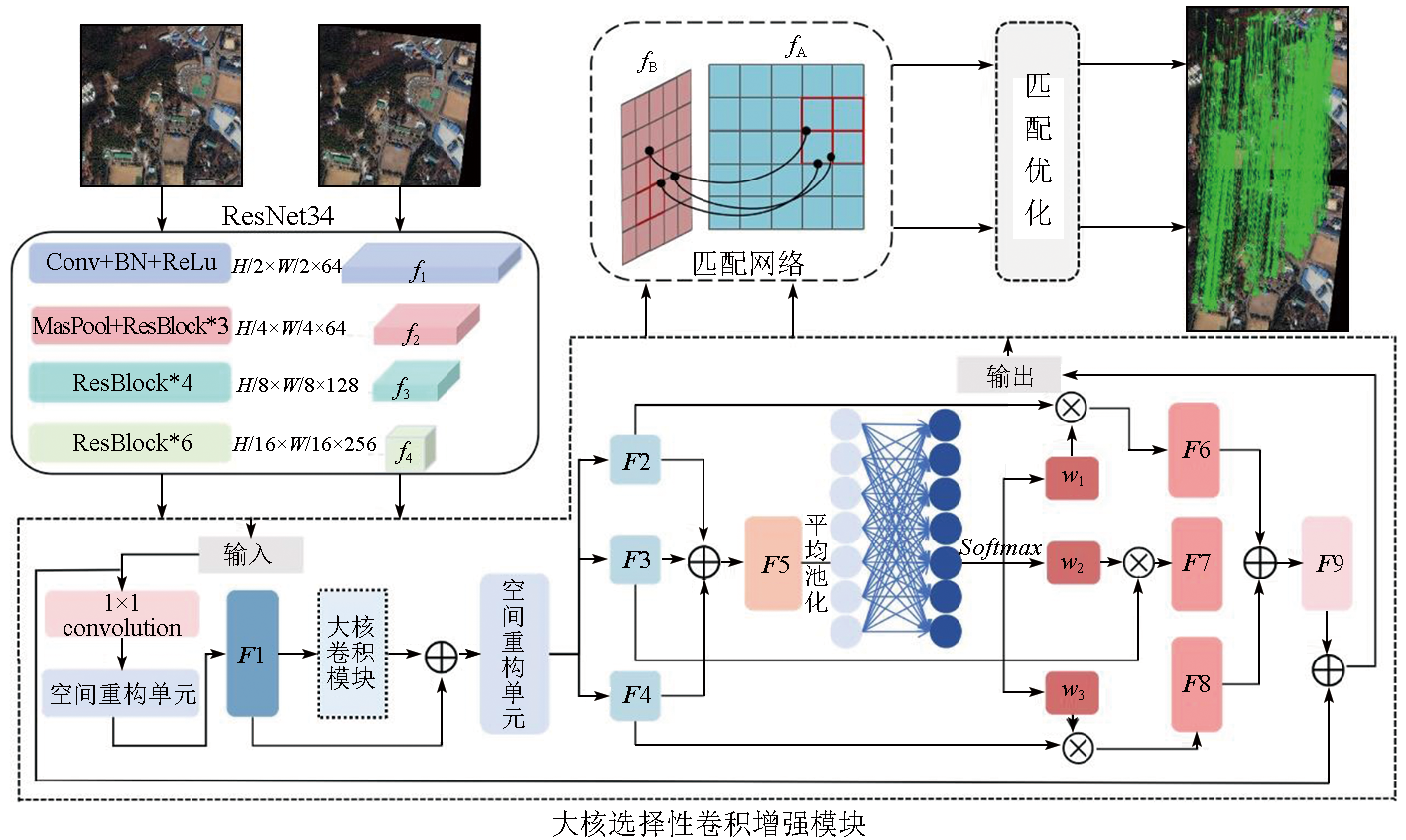
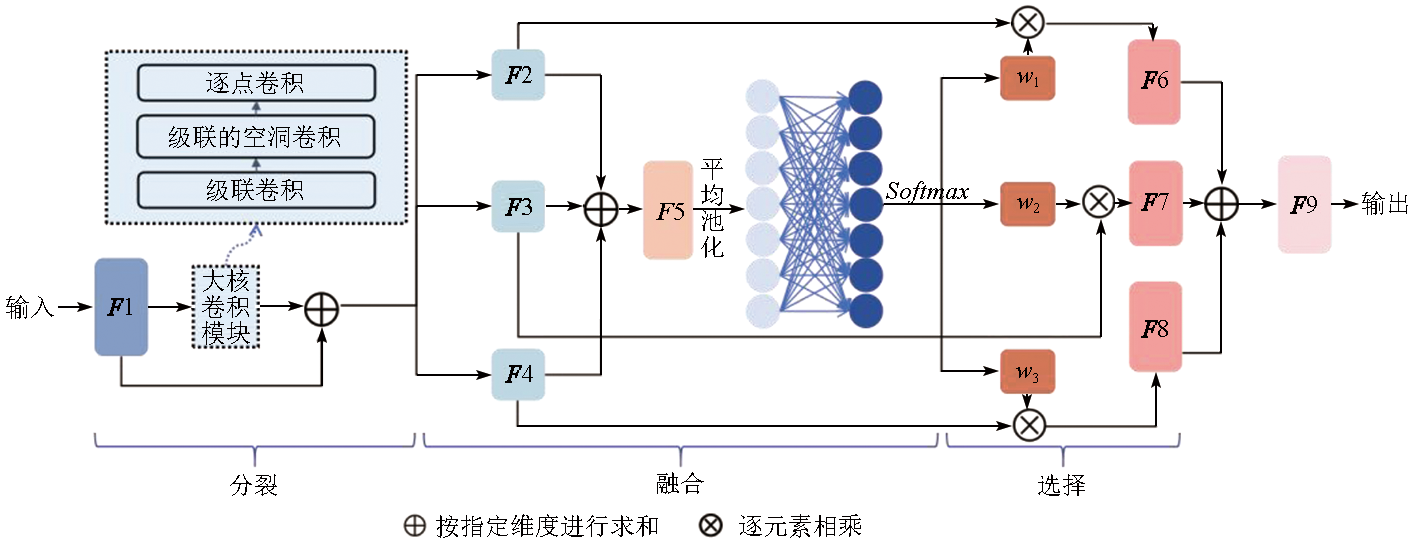
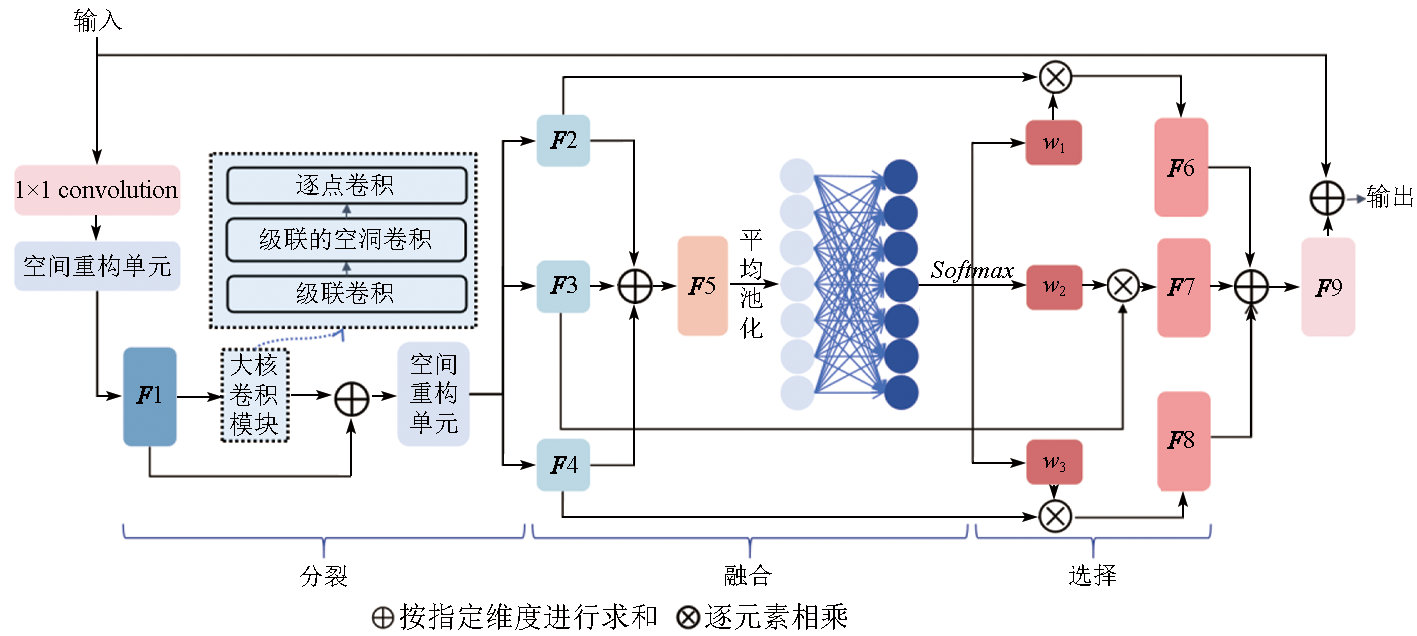
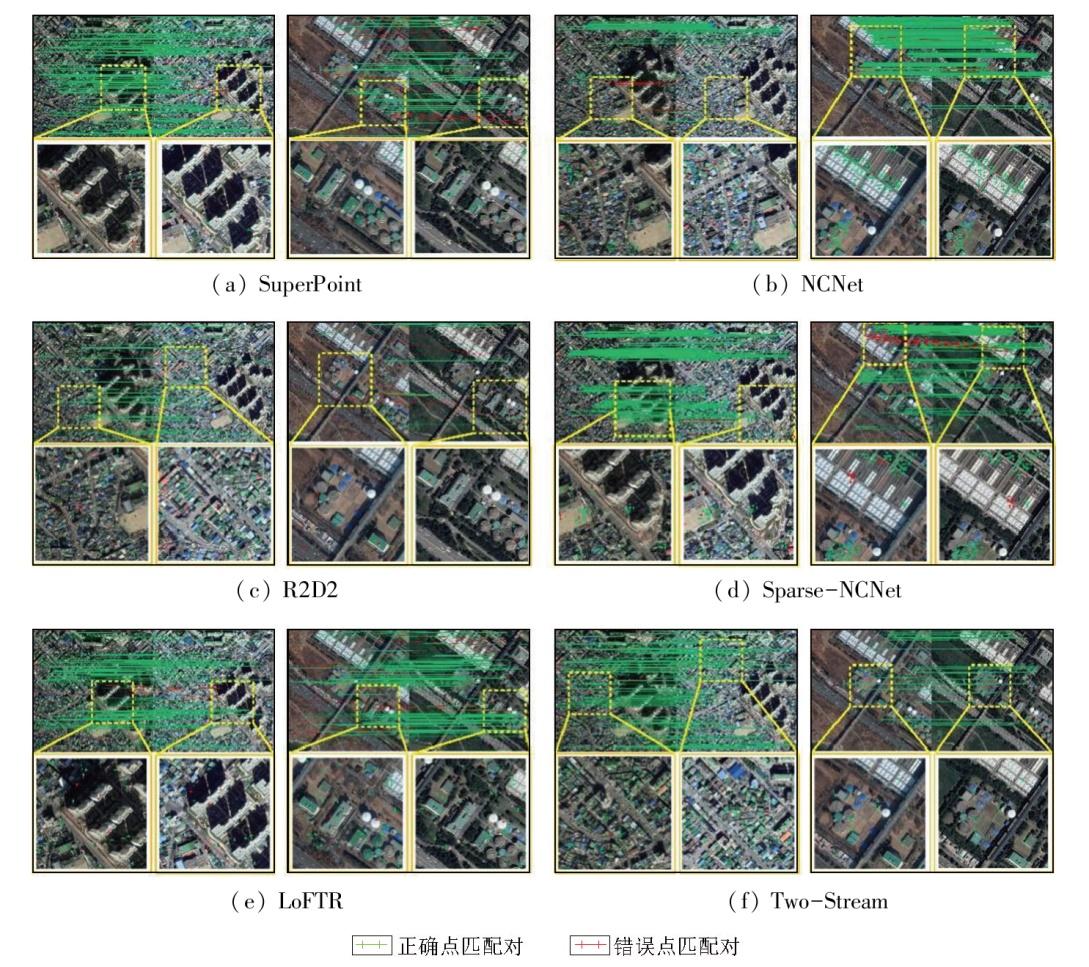
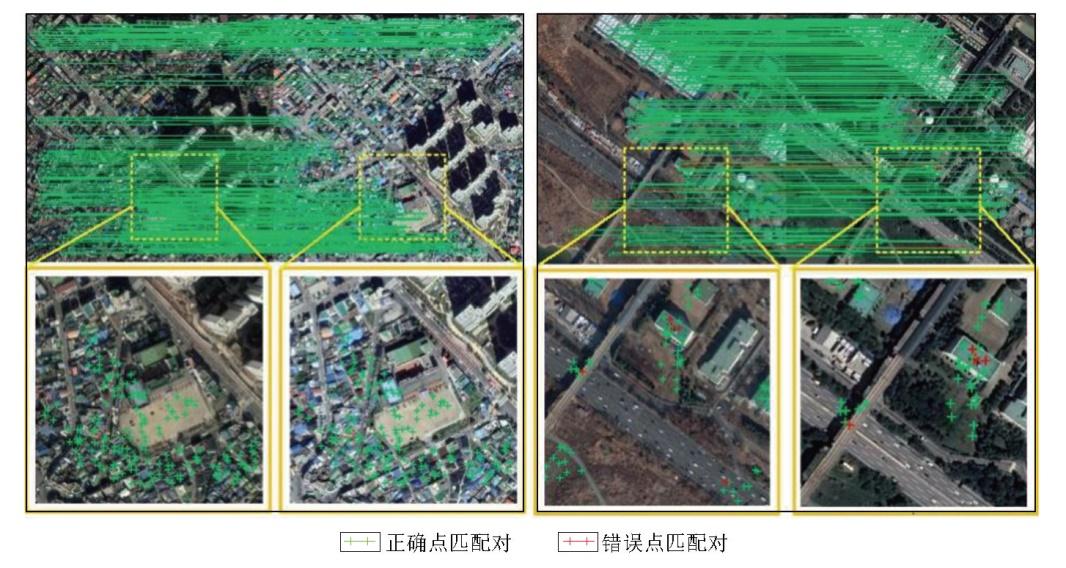
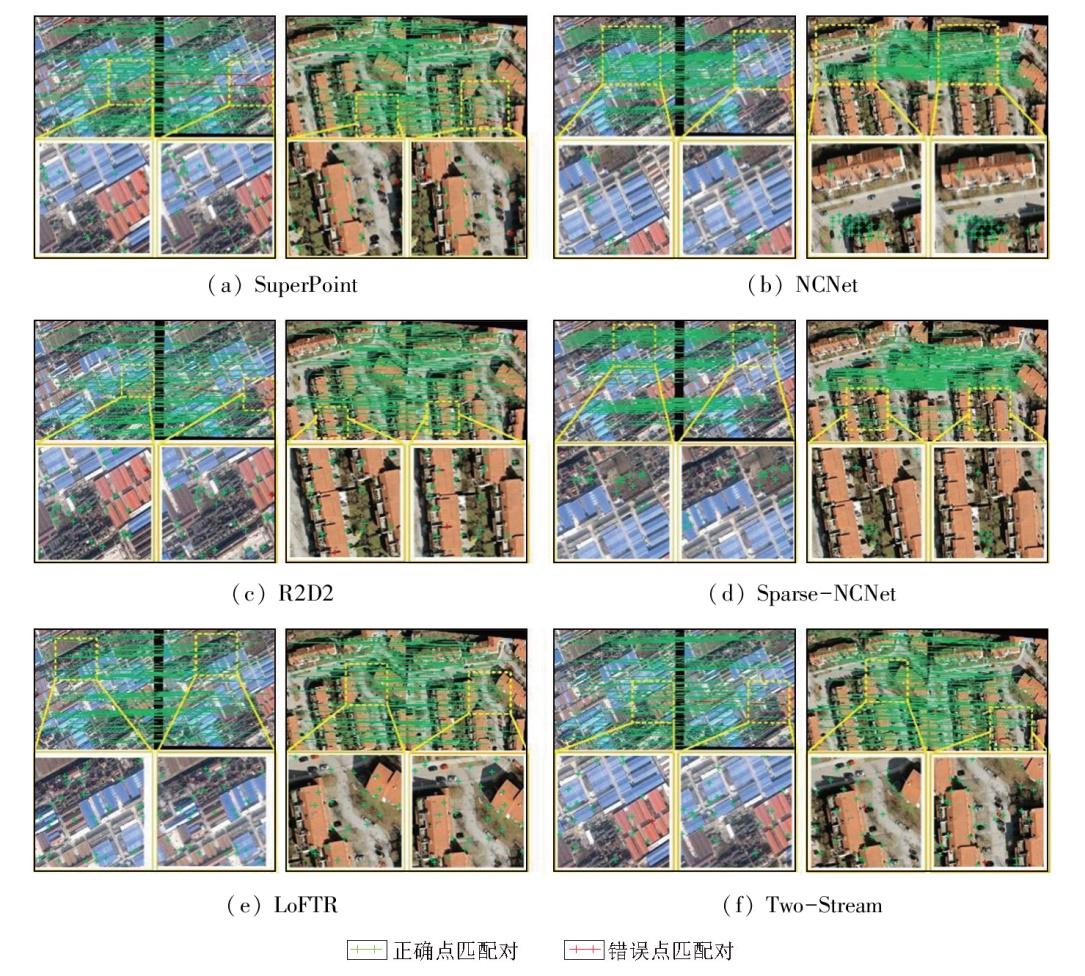
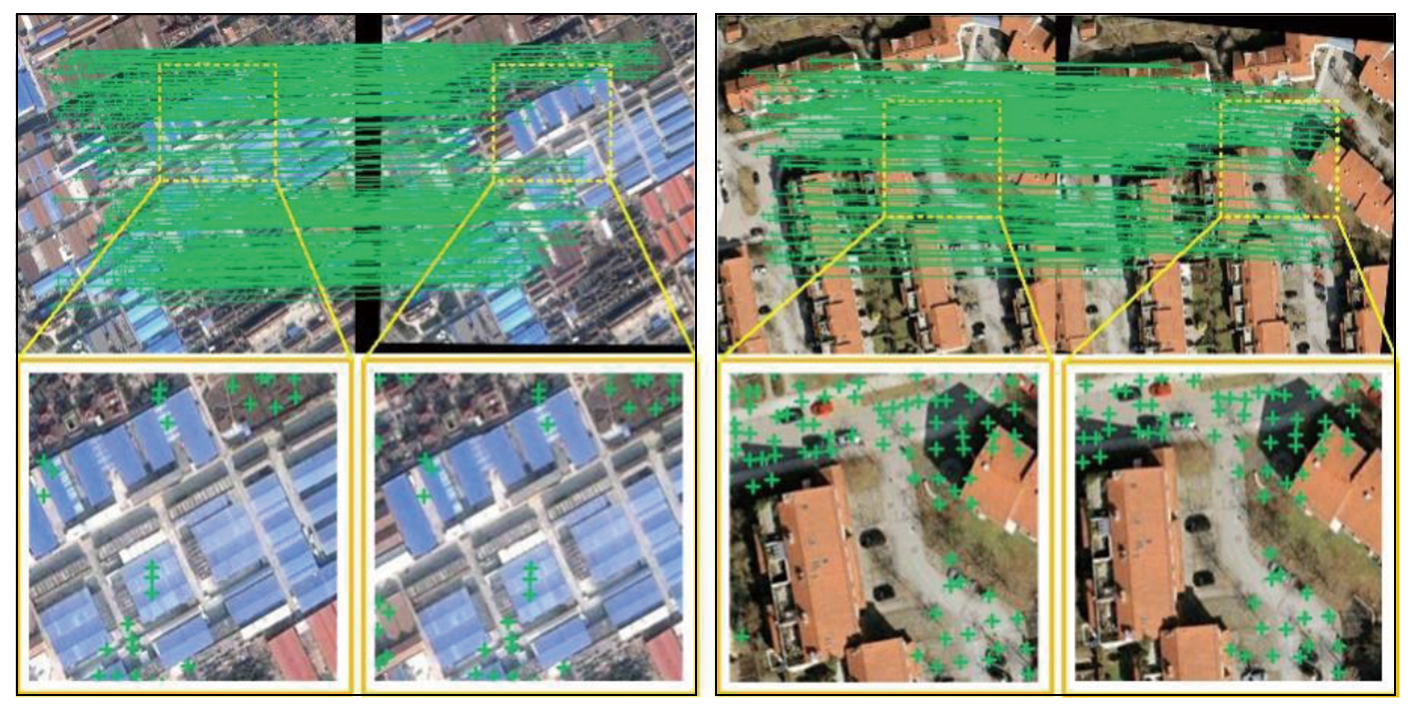
Extracting information on various surface features from remote sensing images requires varying contextual data. To address this issue, this study proposed a new feature point matching method that integrated a large selective kernel-enhanced convolutional module. In this method, based on the ResNet34 network, a large selective kernel-enhanced convolutional module was embedded for dynamic feature extraction of different surface feature targets. Then, the initial dense matching was obtained using a sparse neighborhood consensus network. Meanwhile, geometric and motion consistency constraints were introduced to conduct the guided diffusion of matching points. Consequently, optimized matching results were achieved. This method yielded a PCK (α=0.05) accuracy of 0.89 on the Google Earth dataset, which increased by 7.22%, 5.95%, 2.30%, 4.71%, 7.22%, and 9.88%, respectively, compared to the SuperPoint, R2D2, NCNet, Sparse-NCNet, LoFTR, and Two-Stream networks. Additionally, it exhibited a high generalization ability on the Hpatches dataset. These results corroborate the effectiveness of the proposed method.
DENG Yuxi , LI Jiatian , LIU Jiayin , LUO Xin , YANG Tao . A remote sensing image matching network combining a large selective kernel-enhanced convolution module[J]. Remote Sensing for Natural Resources, 2025 , 37(6) : 138 -147 . DOI: 10.6046/zrzyyg.2024365
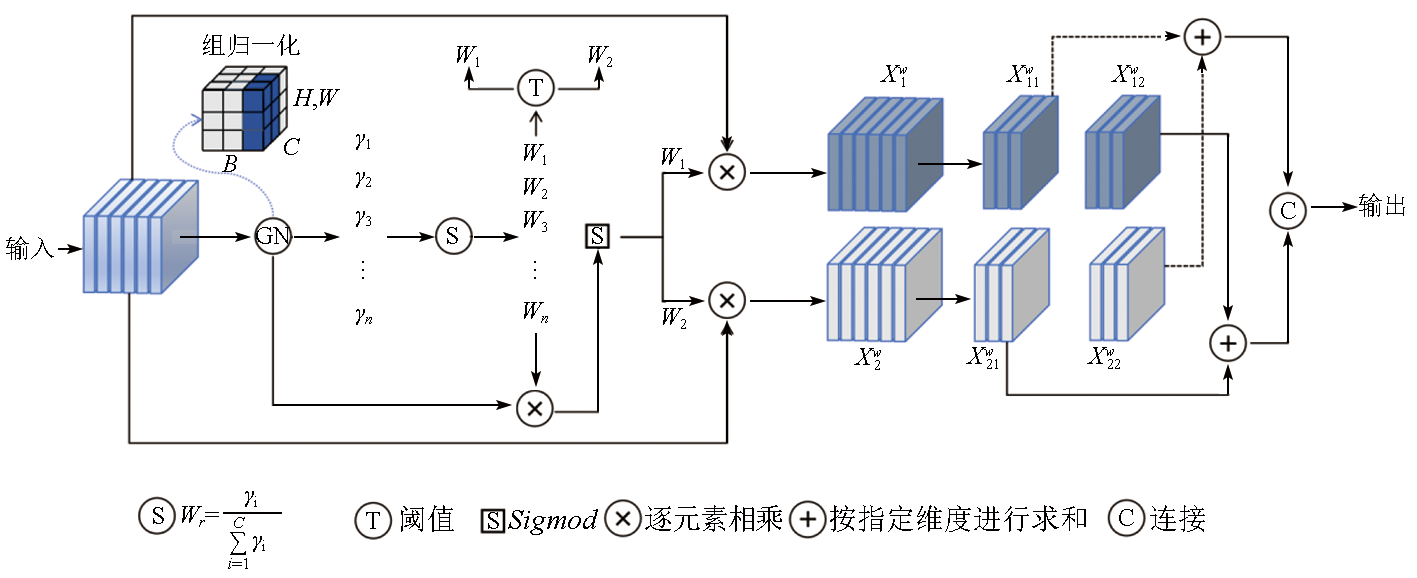
W=Gate(Sigmod(Wγ(GN(X)))) 。
表1 Google Earth数据集精度比较Tab.1 Google Earth datasets Precision comparison |
| 方法 | PCK值 | MSE | RMSE | MAE | CMR/% | |
|---|---|---|---|---|---|---|
| α=0.1 | α=0.05 | |||||
| SuperPoint | 0.84 | 0.83 | 3.36 | 1.83 | 0.47 | 82.31 |
| R2D2 | 0.85 | 0.84 | 33.91 | 5.82 | 0.60 | 80.44 |
| NCNet | 0.88 | 0.87 | 5.70 | 2.39 | 1.39 | 90.01 |
| Sparse-NCNet | 0.85 | 0.85 | 0.97 | 0.99 | 0.53 | 93.97 |
| LoFTR | 0.94 | 0.83 | 9.17 | 3.03 | 1.31 | 85.47 |
| Two-Stream | 0.90 | 0.81 | 0.92 | 0.96 | 0.52 | 94.12 |
| 本文方法 | 0.97 | 0.89 | 0.88 | 0.94 | 0.46 | 95.58 |
表2 WHU-RS19数据集精度比较Tab.2 WHU-RS19 datasets Precision comparison |
| 方法 | PCK值 | MSE | RMSE | MAE | CMR/% | |
|---|---|---|---|---|---|---|
| α=0.1 | α=0.05 | |||||
| SuperPoint | 0.76 | 0.74 | 14.51 | 3.81 | 0.50 | 80.21 |
| R2D2 | 0.82 | 0.81 | 26.03 | 5.10 | 0.50 | 78.92 |
| NCNet | 0.84 | 0.83 | 101.34 | 10.01 | 1.04 | 77.27 |
| Sparse-NCNet | 0.81 | 0.80 | 15.60 | 3.95 | 0.41 | 91.74 |
| LoFTR | 0.92 | 0.83 | 26.34 | 5.13 | 1.07 | 85.28 |
| Two-Stream | 0.88 | 0.81 | 1.88 | 1.37 | 0.87 | 91.44 |
| 本文方法 | 0.93 | 0.84 | 1.74 | 1.31 | 0.57 | 91.53 |
表3 Hpatches数据集的MMA精度比较Tab.3 Hpatches datasets MMA Precision comparison |
| 方法 | 总体 | 照度 | 视角 |
|---|---|---|---|
| 准确率(%, <1/3/5 px) | |||
| SuperPoint | 0.35/0.65/0.73 | 0.43/0.69/0.78 | 0.27/0.60/0.67 |
| R2D2 | 0.33/0.73/0.81 | 0.37/0.76/0.85 | 0.29/0.70/0.77 |
| NCNet | 0.43/0.63/0.80 | 0.81/0.83/0.91 | 0.07/0.44/0.70 |
| Sparse-NCNet | 0.45/0.79/0.87 | 0.62/0.84/0.91 | 0.30/0.73/0.83 |
| LoFTR | 0.39/0.72/0.86 | 0.62/0.92/0.95 | 0.18/0.52/0.78 |
| Two-Stream | -/-/-① | -/-/- | -/-/- |
| 本文方法 | 0.44/0.82/0.91 | 0.61/0.92/0.98 | 0.26/0.71/0.84 |
①“-”表示匹配图像误差过大,不纳入比较。 |
表4 大核选择性卷积增强模块的消融实验结果Tab.4 Results of ablation experiments of based enhanced large selective Kernel convolution module |
| LSKC | SRU | MSE | RMSE | MAE |
|---|---|---|---|---|
| × | × | 0.971 | 0.985 | 0.530 |
| √ | × | 0.962 | 0.981 | 0.492 |
| × | √ | 0.889 | 0.943 | 0.447 |
| √ | √ | 0.884 | 0.940 | 0.463 |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
李星华, 艾文浩, 冯蕊涛, 等. 遥感影像深度学习配准方法综述[J]. 遥感学报, 2023, 27(2):267-284.
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
陈颖, 张祺, 李文举, 等. 参数合成空间变换网络的遥感图像一致性配准[J]. 中国图象图形学报, 2021, 26(12):2964-2980.
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}