
Remote Sensing for Natural Resources >
A method for 3D modeling of trees based on terrestrial LiDAR point cloud
Received date: 2023-07-14
Revised date: 2023-12-15
Online published: 2026-06-03
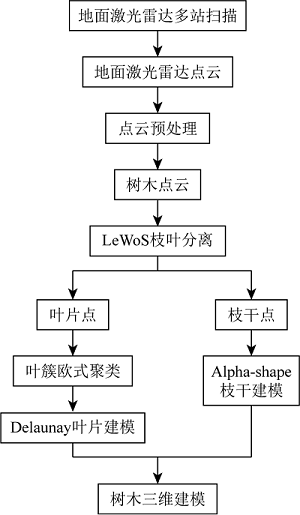
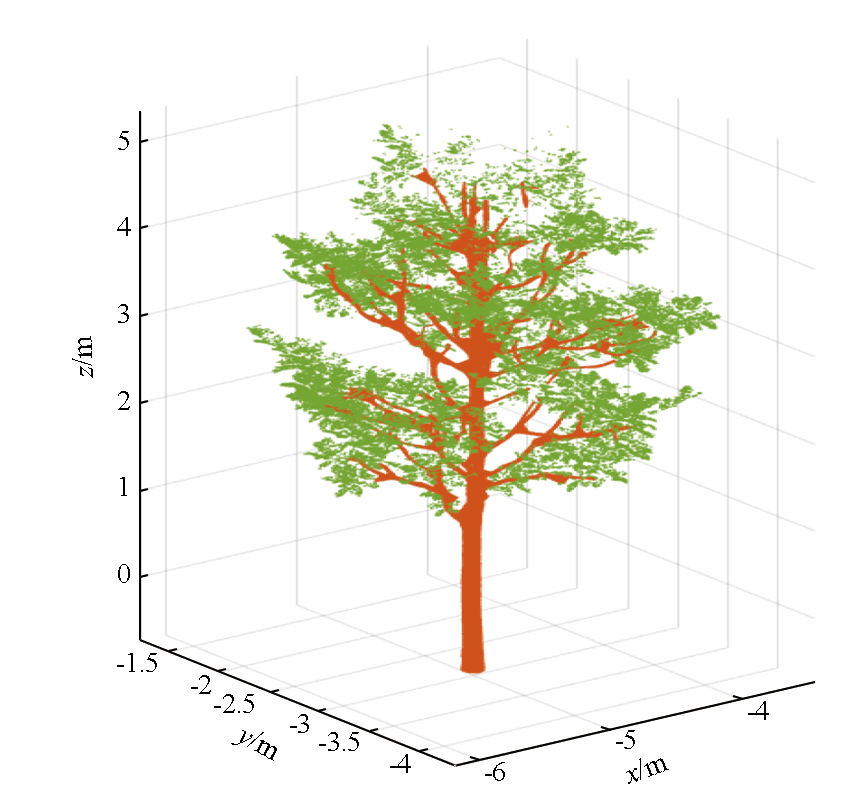
To capture information about the 3D geometric structures of trees more effectively and address the challenge of high-precision, high-fidelity tree reconstruction, this study proposed a method for 3D modeling of trees based on terrestrial LiDAR point cloud. To overcome the occlusion caused by leaf gaps in TLS, this method fully considered the aggregation of leaves, as well as the morphological characteristics of both leaves and branches. By conducting the model fitting and reconstruction of tree leaves and branches using Delaunay triangulation and Alpha-shape algorithm, respectively, the proposed method effectively addressed previous issues such as unrealistic tree structures and imprecise organ modeling, thus achieving the 3D reconstruction of individual tree leaves and small branches efficiently. This study holds great significance for determining forest structural parameters and managing resources, while also offering a valuable reference for component-level real scene 3D modeling of typical trees.
WAN Lihong , CAO Zhenyu , TIAN Zhilin , SHI Yanli . A method for 3D modeling of trees based on terrestrial LiDAR point cloud[J]. Remote Sensing for Natural Resources, 2025 , 37(1) : 62 -67 . DOI: 10.6046/zrzyyg.2023211
| [1] |
黄洪宇, 陈崇成, 邹杰, 等. 基于地面激光雷达点云数据的单木三维建模综述[J]. 林业科学, 2013, 49(4):123-130.
|
| [2] |
张天安, 云挺, 薛联凤, 等. 基于地面激光雷达的活立木枝干三维建模[J]. 南京林业大学学报(自然科学版), 2015, 39(4):163-167.
|
| [3] |
卢军, 刘宪钊, 孟维亮, 等. 基于地面激光点云数据的单木三维重建方法[J]. 南京林业大学学报(自然科学版), 2021, 45(6):193-199.
|
| [4] |
王向玉, 谢东辉, 汪艳, 等. 基于地面激光雷达点云数据的单木三维重建[J]. 遥感技术与应用, 2015, 30(3):455-460.
|
| [5] |
|
| [6] |
苏中花. 基于地面激光雷达点云数据的单木三维建模[D]. 成都: 成都理工大学, 2019.
|
| [7] |
王晓辉. 基于地面激光雷达点云的单树三维几何建模研究[D]. 福州: 福州大学, 2014.
|
| [8] |
段芸杉. 基于激光雷达点云数据的单木建模综述[J]. 测绘与空间地理信息, 2022, 45(5):80-82.
|
| [9] |
李萍, 冯仲科, 苏珏颖. 定量结构模型的地面激光雷达单木分割应用[J]. 测绘科学, 2022, 47(2):151-156,199.
|
| [10] |
傅根深, 陈健, 黄庆丰, 等. 基于地基激光雷达的单木森林参数提取分析[J]. 安徽农业科学, 2022, 50(4):128-131.
|
| [11] |
林筱涵, 李爱农, 边金虎, 等. 基于网络图的地基激光雷达复杂树木点云枝叶分离方法[J]. 遥感技术与应用, 2022, 37(1):161-172.
|
| [12] |
廖晓和. 基于车载点云数据的树木提取与分析[J]. 测绘通报, 2020(11):163-166.
|
| [13] |
李庆, 高祥伟, 费鲜芸, 等. 利用Alpha-shape算法进行树冠三维模型构建[J]. 测绘通报, 2018(12):91-95.
|
| [14] |
付昱兴, 李承明, 朱江, 等. Alpha-shape算法构建枣树点云三维模型[J]. 农业工程学报, 2020, 36(22):214-221.
|
| [15] |
张波, 刘红伟, 裴小节. 基于三维激光点云数据建立三维树木模型方法的研究[J]. 安徽农业科学, 2011, 39(33):20904-20905,20930.
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}