
Spatial differentiation and risk zonation of debris flow hazards in Tajikistan
Received date: 2025-10-09
Revised date: 2025-12-22
Accepted date: 2026-01-05
Online published: 2026-03-11
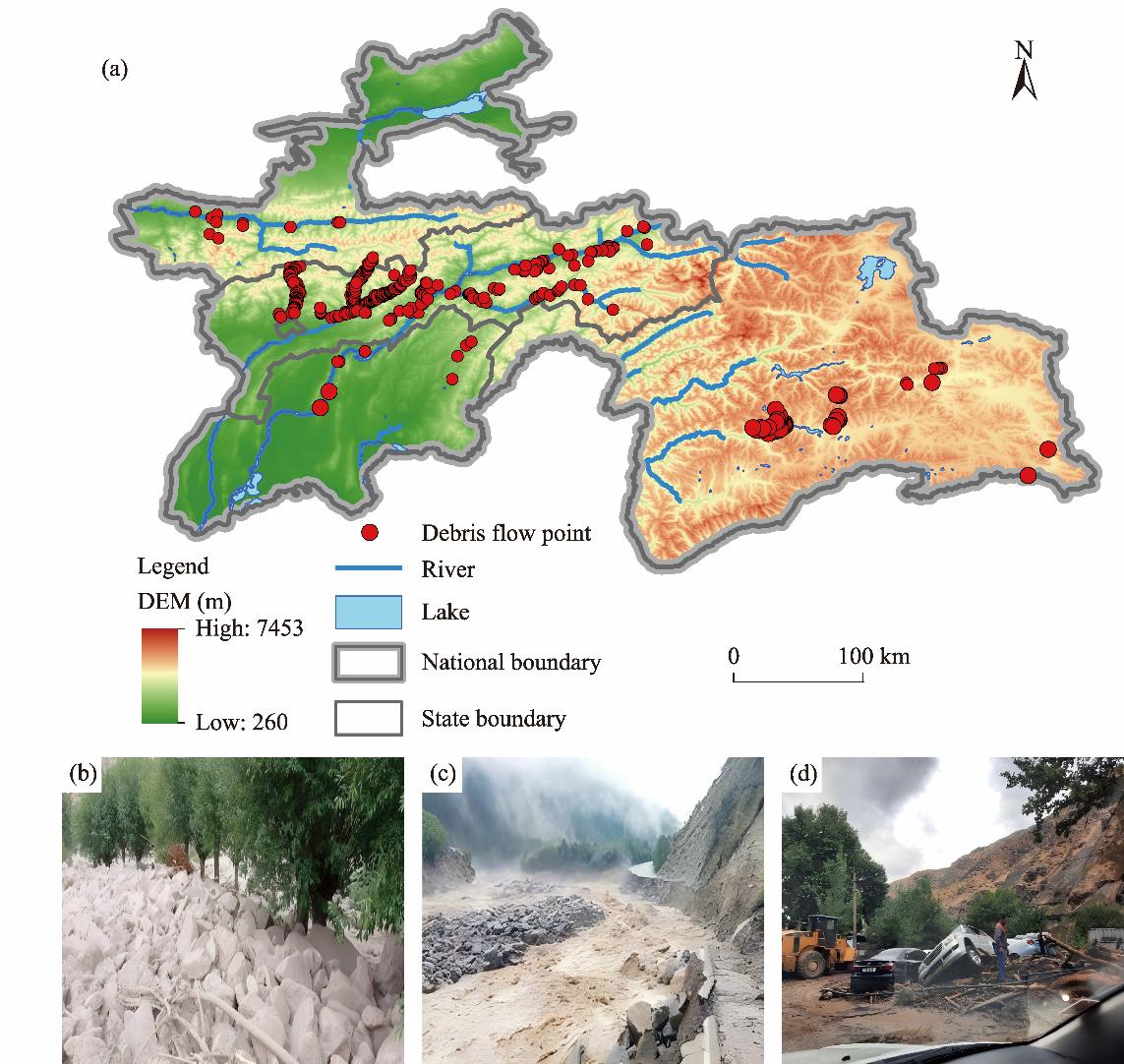
Debris flow events are frequent in Tajikistan, yet comprehensive investigations at the regional scale are limited. This study integrates remote sensing, Geographic Information System, and machine learning techniques to evaluate debris flow susceptibility and associated hazards across Tajikistan. A dataset comprising 405 documented debris flow points and 14 influencing factors, encompassing geological, climatic-hydrological, and anthropogenic variables, was established. Three machine learning algorithms—Random Forest, Support Vector Machine (SVM), and Multi-layer Perceptron—were applied to generate susceptibility maps and delineate debris flow risk zones. The results indicate that the areas of higher and high susceptibility accounted for 20.43% and 4.41% of the national area, respectively, and were predominantly concentrated along the Zeravshan and Vakhsh river basins. Among the evaluated models, SVM model demonstrated the highest predictive performance. Beyond conventional topographic and environmental controls, drought conditions were identified as a critical factor influencing debris flow occurrence within the arid and semi-arid mountainous regions of Tajikistan. These findings provide a scientific basis for regional debris flow risk management and disaster mitigation planning, and offer practical guidance for selecting conditioning factors in machine-learning-based susceptibility assessments in other dry mountainous environments.
Key words: Debris flow; Susceptibility; Assessment; Risk zonation; Machine learning; Drought; Central Asia
JIA Wenjun , CHEN Ningsheng , XUE Yang , WANG Zhihan , WEN Tao , GUO Ru , Safaralizoda NOSIR , Aminjon GULAKHMADOV . Spatial differentiation and risk zonation of debris flow hazards in Tajikistan[J]. Regional Sustainability, 2026 , 7(1) : 100299 . DOI: 10.1016/j.regsus.2026.100299
Fig. 1. Overview of debris flow disasters in Tajikistan. (a), study area and distribution of debris flow points; (b), gravel deposited around tree trunks following a debris flow; (c), road destroyed by the debris flow; (d), trees and vehicles destroyed by the debris flow. DEM, digital elevation model. Note that the national boundary and state boundary were obtained from the Global Administrative Areas (GADM) database version 4.2 (http://www.gadm.org/), which provides generalized boundaries and does not explicitly represent disputed or undetermined borders. The boundary of the standard map used in this study has not been modified. |
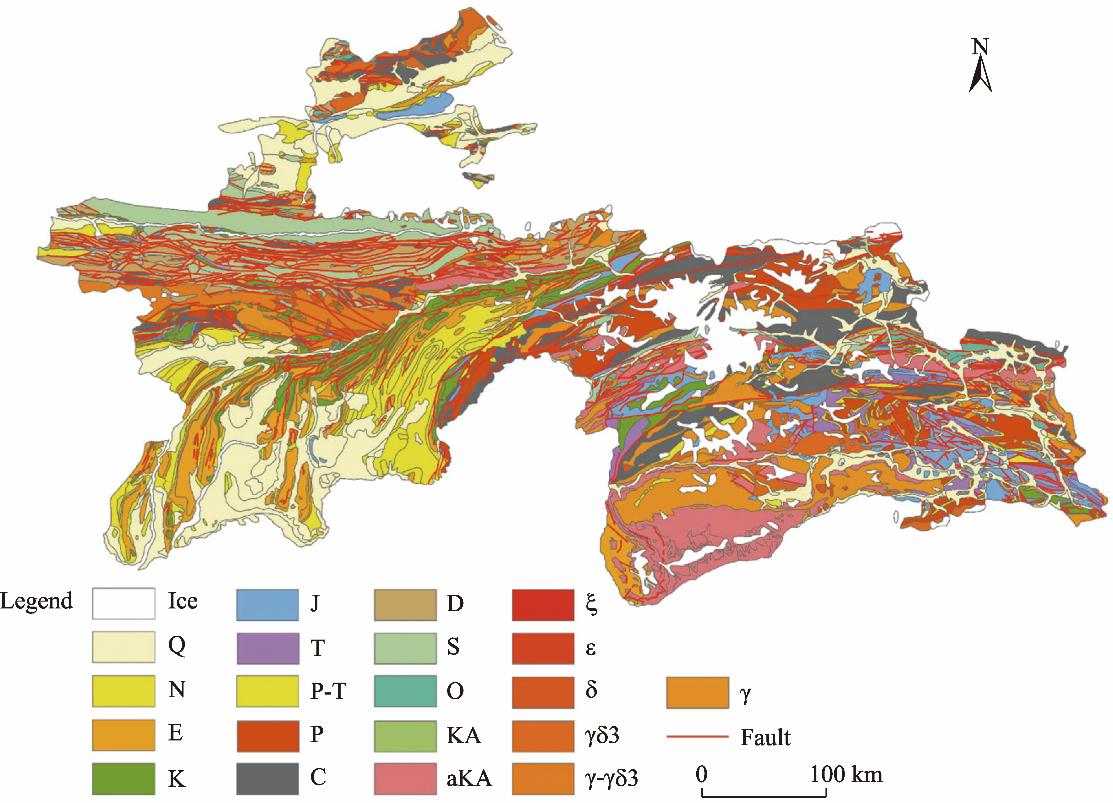
Fig. 2. Geological map of Tajikistan. Stratigraphic units are categorized as follows: Q (Quaternary): unconsolidated deposits mainly composed of mud, clay, sand, gravel, alluvium, and silt; N (Neogene): sandstone, conglomerate, and clay; E (Paleogene): variegated clays, sandstone, siltstone, dolomite, gypsum, conglomerate, and limestone; K (Cretaceous): redstone, siltstone, clay, conglomerates, and limestone; J (Jurassic): limestone, sandstone, silt, gypsum, and siltstone; T (Triassic): variegated sandstones, conglomerate, and siltstone; P-T (Permian-Triassic): limestone, sandstone, siltstone, and conglomerate; P (Permian): limestone, sandstone, tuff, slate, diabase, and marl; C (Carboniferous): limestone, slate, siltstone, sandstone, dacite, diabase, tuff, and andesite; D (Devonian): dolomite, limestone, slate, and chert; S (Silurian): slate, limestone, dolomite, diabase, and porphyrite; O (Ordovician): slate, sandstone, and siltstone; KA (Cambrian): slate, limestone, siltstone, and sandstone; aKA (Precambrian): quartzite, feldspathic quartzite, and sericite; ξ: monzogranite; ε: ultrabasic complex; δ: diorite; γδ3: granodiorite; γ-γδ3: granodiorite-granite; γ, granodiorite. |
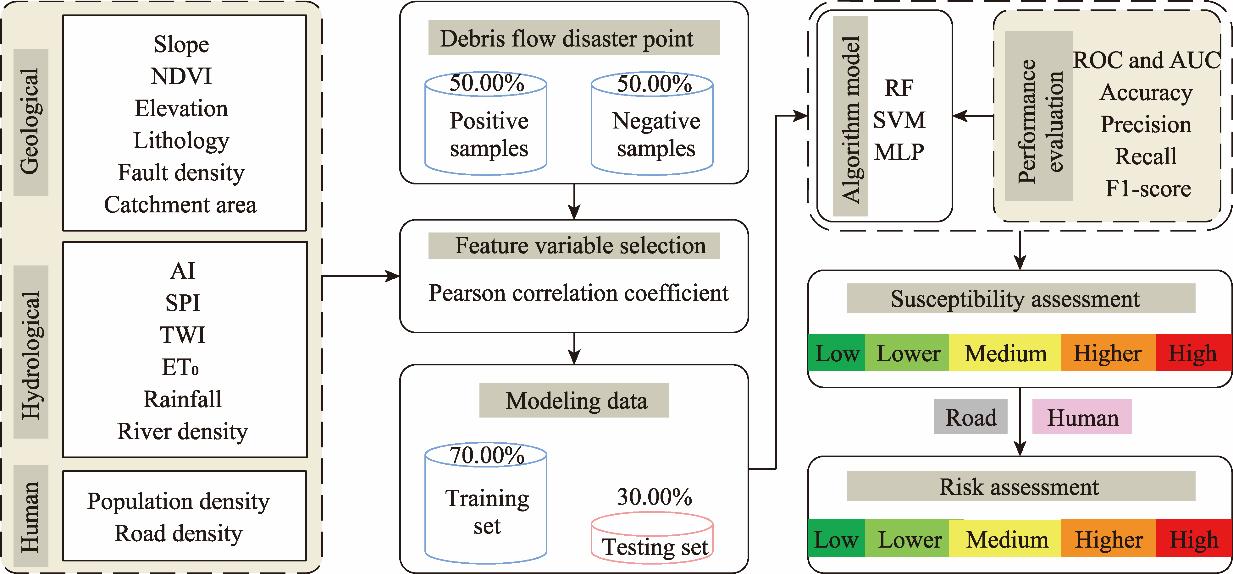
Fig. 3. Flow chart of this study. NDVI, Normalized Difference Vegetation Index; AI, Aridity Index; SPI, Stream Power Index; TWI, Topographic Wetness Index; ET0, potential evapotranspiration; RF, Random Forest; SVM, Support Vector Machine; MLP, Multi-layer Perceptron; ROC, Receiver Operating Characteristic; AUC, Area under the ROC curve; F1-score, harmonic mean of precision and recall. |
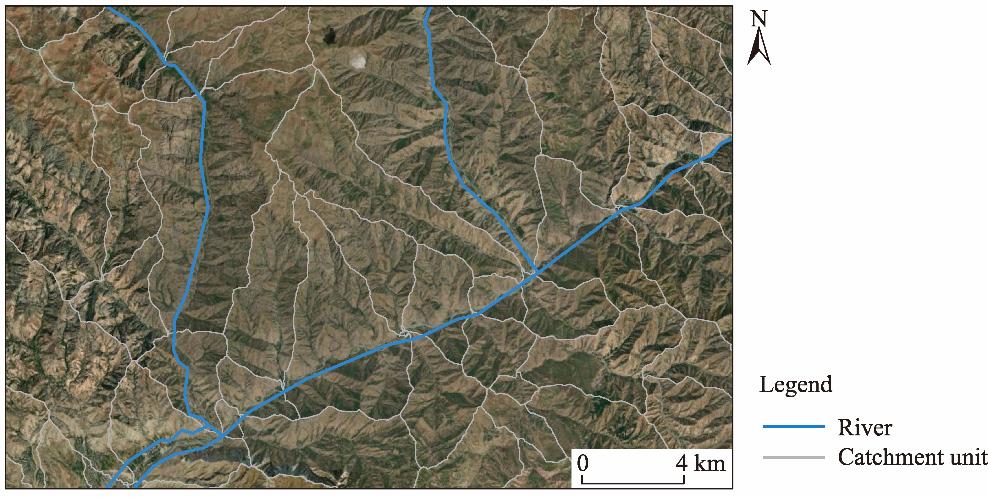
Fig. 4. Catchment units with an area larger than 1 km2 extracted via Geographic Information System (GIS) platform. |
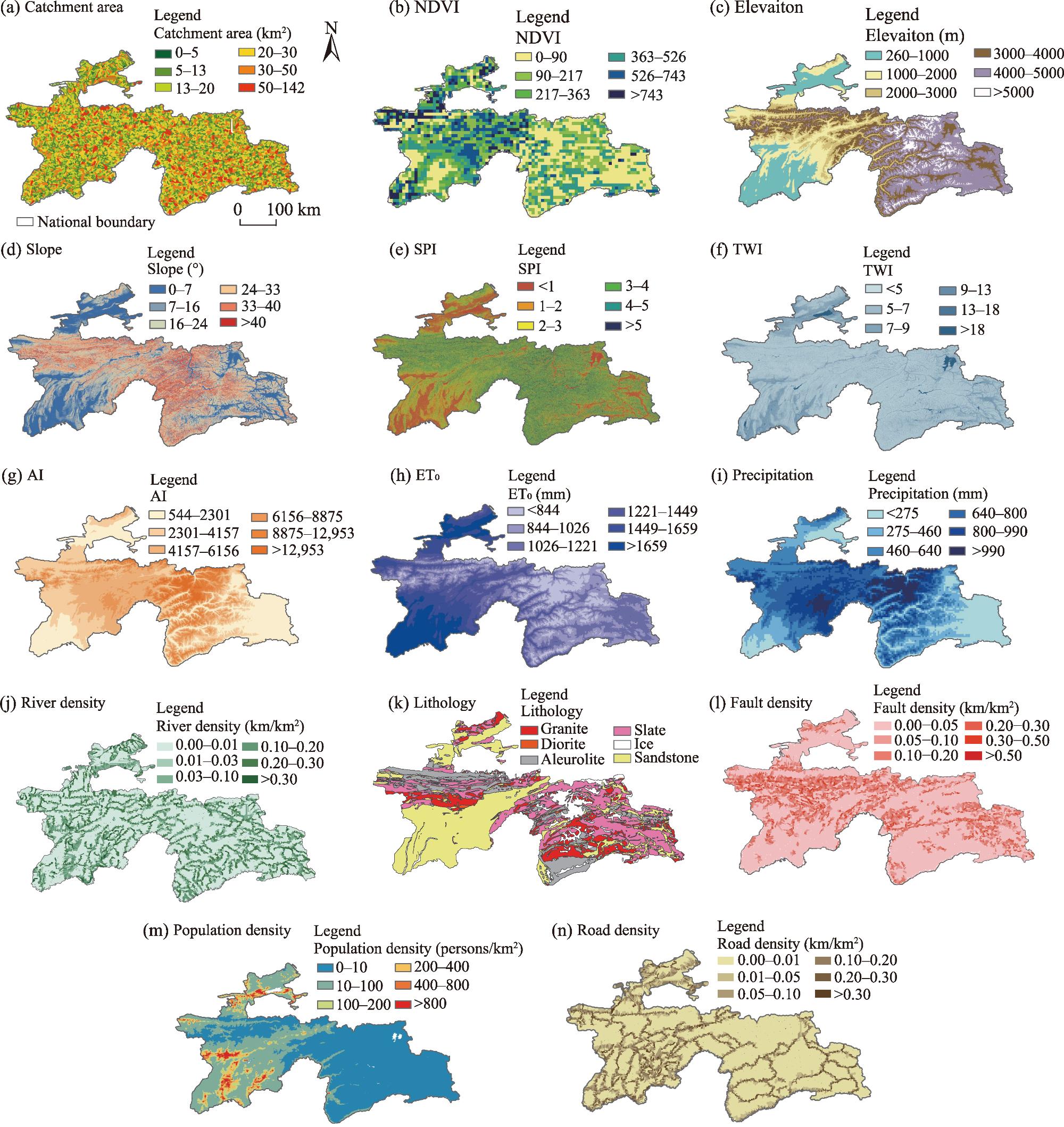
Fig. 5. Spatial distribution of debris flow influencing factors. (a), catchment area; (b), NDVI; (c), elevation; (d), slope; (e), SPI; (f), TWI; (g), AI; (h), ET0; (i), precipitation; (j), river density; (k), lithology; (l), fault density; (m), population density; (n), road density. Note that the national boundary and state boundary were obtained from the GADM database version 4.2 (http://www.gadm.org/), which provides generalized boundaries and does not explicitly represent disputed or undetermined borders. The boundary of the standard map used in this study has not been modified. |
Table 1 Characteristic variables selected in this study. |
| Factor type | Factor name | Effect on debris flow activity | Data source |
|---|---|---|---|
| Geological factor | Elevation (m) | Mountainous terrain supplies abundant loose material and features steep slopes, thereby elevating the probability of debris flow occurrence. | Elevation was extracted from the 30 m resolution digital elevation model (DEM) provided by United States Geological Survey (USGS) (https://earthexplorer.usgs.gov/) |
| Slope (°) | Steeper slopes enhance gravity-driven mass movement, leading to slope instability and rapid downslope sliding. | Calculated from DEM in ArcGIS software (version 10.8; Esri, Inc., Redlands, the USA) | |
| Normalized Difference Vegetation Index (NDVI) | The NDVI reflects vegetation coverage. | Li et al. (2023) | |
| Lithology | Loose deposits or weak rocks are easily eroded by rainfall, providing abundant source materials for debris flows. | 1:150,000 geological map (Academy of Sciences of the Tajik SSR,1968) | |
| Fault density (km/km2) | Faults influence the degree of bedrock fragmentation. For linear variables, fault density indicates the total fault length per unit area (Huang et al., 2022a). | Calculated from 1:150,000 geological map of Tajikistan (Academy of Sciences of the Tajik SSR, 1968) | |
| Climatic and hydrological factor | Precipitation (mm) | Precipitation denotes the total cumulative precipitation in 2024. | WorldClim (https://www.worldclim.org/data/worldclim21.html) |
| River density (km/km2) | Dense river networks facilitate runoff concentration and may erode gully toes, triggering debris flows. | National Earth System Science Data Center (https://www.geodata.cn/main/) | |
| Aridity Index (AI) | The AI is an indicator of climatic dryness, defined as the ratio of water loss to water supply. Arid conditions can cause surface cracking, enhance rainfall infiltration into slopes, and promote debris flow initiation. | Figshare (https://doi.org/10.6084/m9.figshare.7504448.v5) | |
| Potential evapotranspiration (ET0; mm) | The ET0 affects soil moisture and vegetation growth; areas with lower ET0 are more likely to retain higher water content. | Figshare (https://doi.org/10.6084/m9.figshare.7504448.v5) | |
| Stream Power Index (SPI) | The SPI reflects the erosive power of flowing water, calculated as: where α is the upslope contributing area (m2); and β is the slope (°). | Calculated from DEM in ArcGIS software | |
| Topographic Wetness Index (TWI) | The TWI characterizes soil moisture conditions in a catchment, calculated as: | Calculated from DEM in ArcGIS software | |
| Human activities | Population density (persons/km2) | Concentrated human activities may disturb slope stability and increase debris flow risk. | WorldPop Hub (https://hub.worldpop.org/geodata/) |
| Road density (km/km2) | Road construction and excavation may weaken slope structure, alter drainage pathways, and enhance debris flow hazards. | National Earth System Science Data Center (https://www.geodata.cn/main/) | |
| Catchment area (km2) | Catchment area serves as the evaluation unit for debris flows. | Calculated from DEM in ArcGIS software | |
Table 2 Statistics of hyper-parameter adjustment range. |
| Model | Hyper-parameter | Range | Step |
|---|---|---|---|
| Random Forest (RF) | n_estimators | 30.00000-800.00000 | 1.00000 |
| max_depth | 10.00000-60.00000 | 1.00000 | |
| max_features | 10.00000-60.00000 | 1.00000 | |
| min_impurity_decrease | 0.00000-5.00000 | 0.10000 | |
| Supporting Vector Machine (SVM) | kenel | ‘rbf’ | - |
| degree | 500.00000-2000.00000 | 1.00000 | |
| gamma | 0.00100-0.30000 | 0.00001 | |
| coef0 | 10.00000-30.00000 | 0.10000 | |
| tol | 0.05000-0.30000 | 0.00100 | |
| C | 10.00000-40.00000 | 0.01000 | |
| Multi-layer Perceptron (MLP) | hidden_layer_sizes | 10.00000-200.00000 | 1.00000 |
| max_iter | 500.00000-2000.00000 | 10.0000 | |
| alpha | 0.00010-0.70000 | 0.00010 | |
| learning_rate | 0.00010-0.65000 | 0.00010 |
Note: -, no data. |
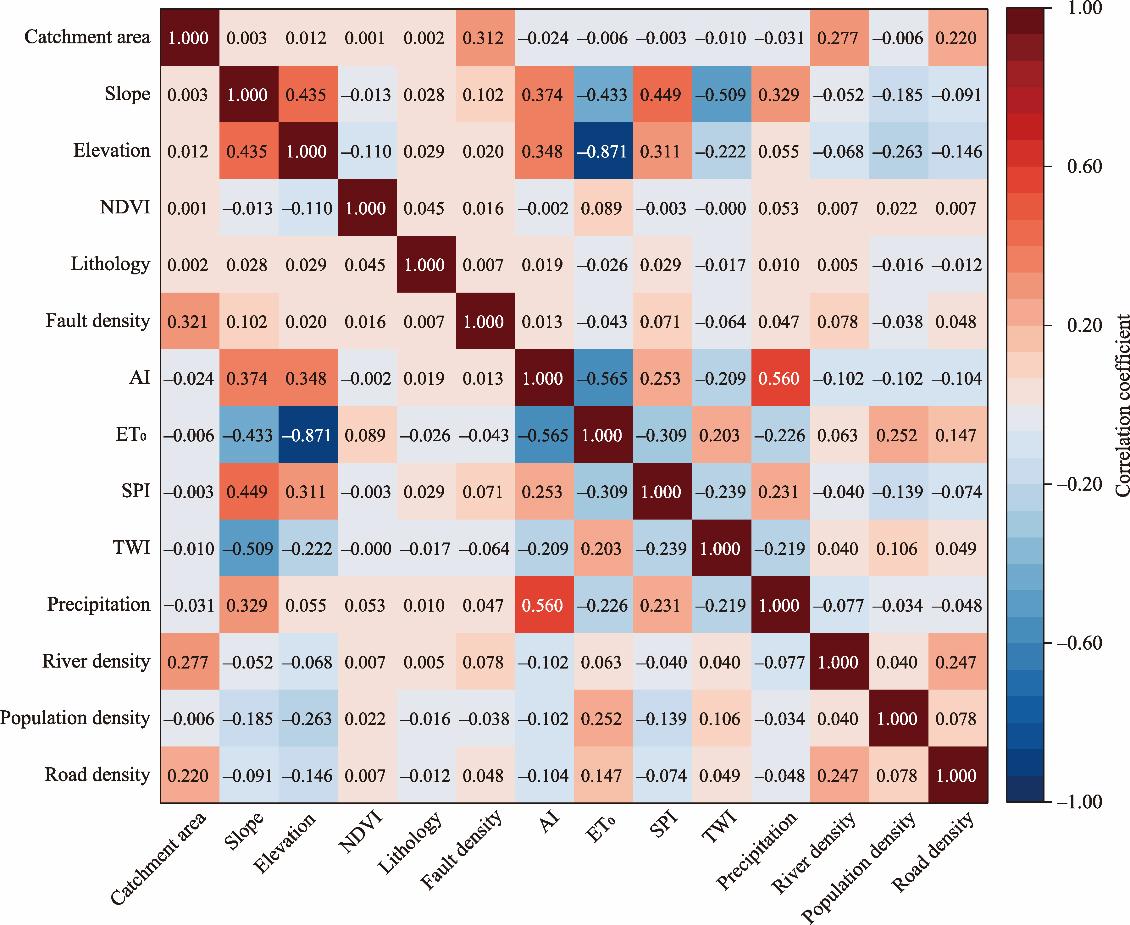
Fig. 6. Pearson correlation between characteristic variables. |
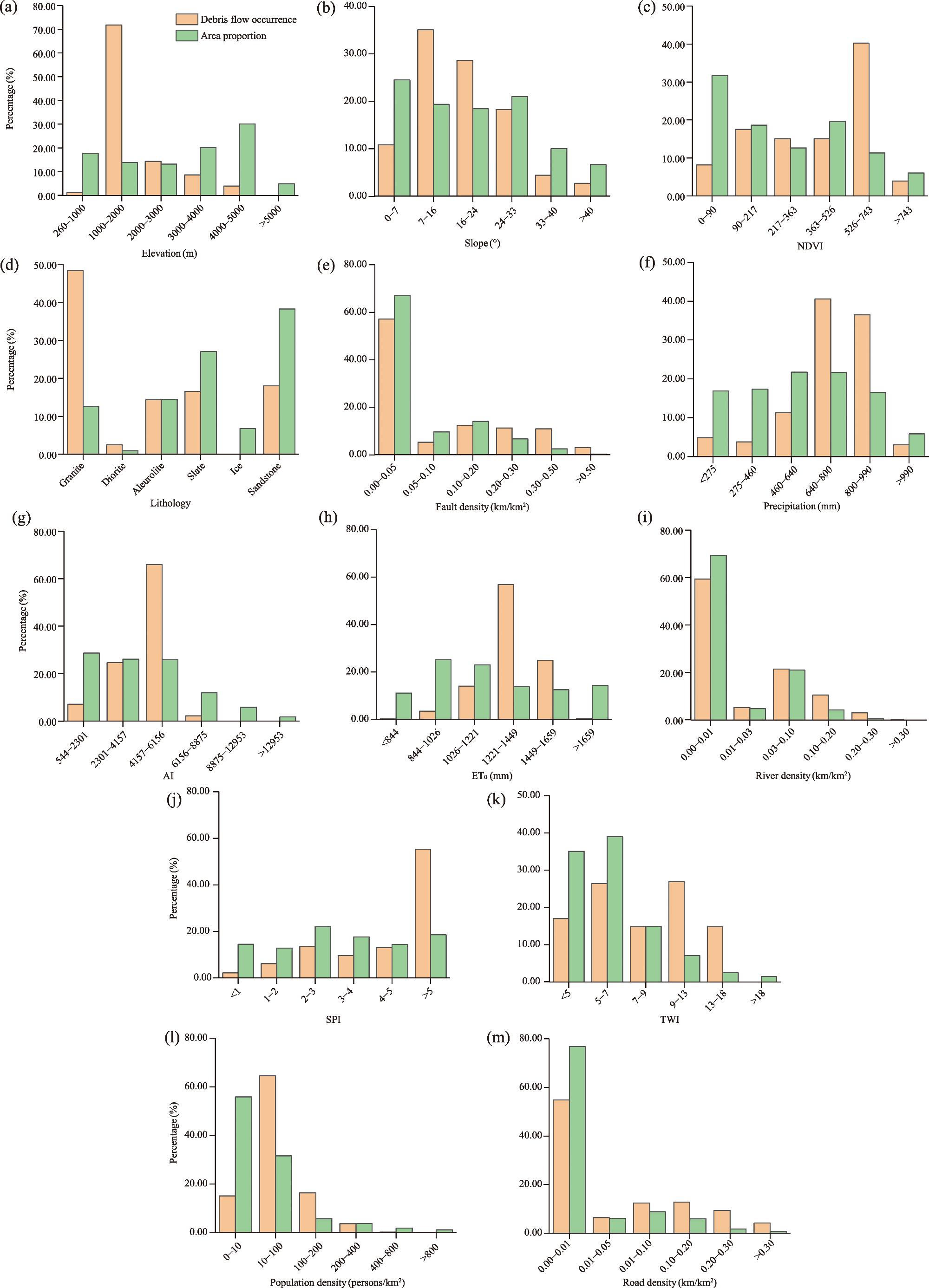
Fig. 7. Distribution of debris flow occurrence and area proportion across different environmental factors. (a), elevation; (b), slope; (c), NDVI; (d), lithology; (e), fault density; (f), precipitation; (g), AI; (h), ET0; (i), river density; (j), SPI; (k), TWI; (l), population density; (m), road density. |
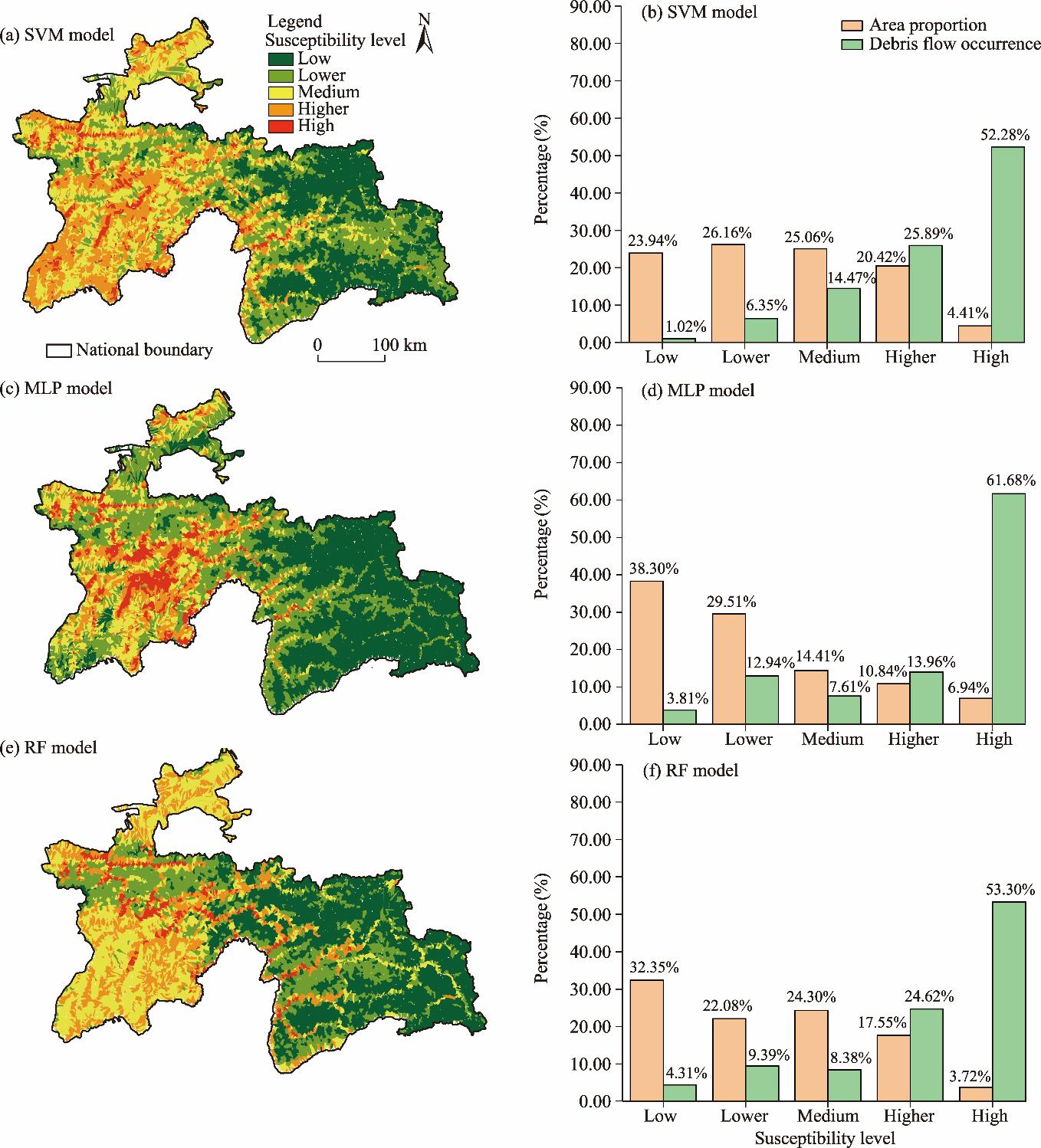
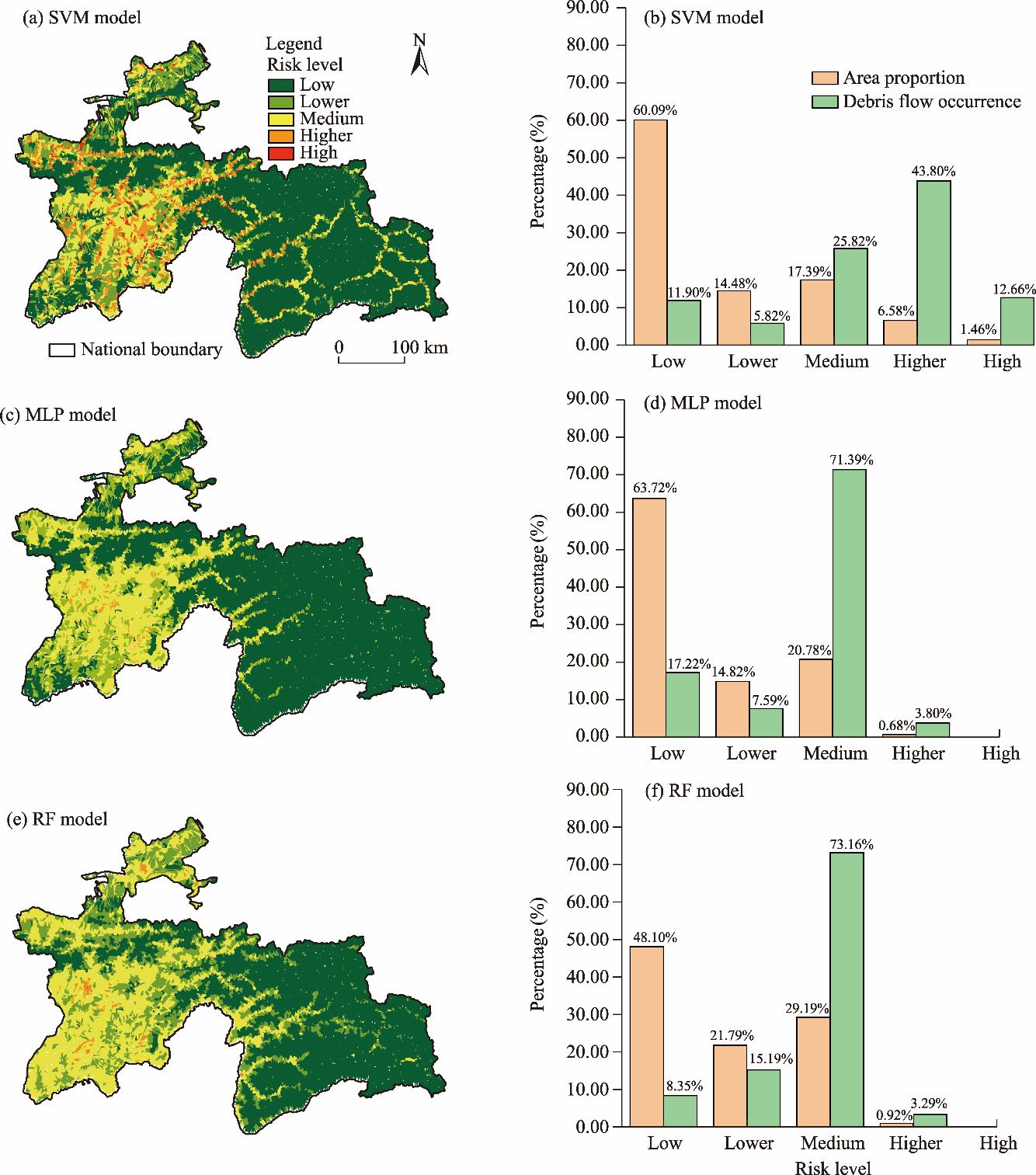
Fig. 8. Debris flow susceptibility assessment based on three machine learning algorithms. (a, c, and e), spatial distribution of debris flow susceptibility based on SVM model, MLP model, and RF model, respectively; (b, d, and f), comparison between area proportion and debris flow occurrence across different susceptibility levels based on SVM model, MLP model, and RF model, respectively. Note that the national boundary and state boundary were obtained from the GADM database version 4.2 (http://www.gadm.org/), which provides generalized boundaries and does not explicitly represent disputed or undetermined borders. The boundary of the standard map used in this study has not been modified. |
Fig. 9. Confusion matrices of the three machine-learning models. (a and b), training set and testing set in SVM model, respectively; (c and d), training set and testing set in RF model, respectively; (e and f), training set and testing set in MLP model, respectively. TP (true positive), the number of debris flow samples correctly predicted as debris flows; TN (true negative), the number of non-debris flow samples correctly predicted as non-debris flows; FP (false positive), the number of non-debris flow samples incorrectly predicted as debris flows; FN (false negative), the number of debris flow samples incorrectly predicted as non-debris flows. The percentages in each column were normalized by the total number of actual samples per class (column-wise proportions). These values indicate the model’s sensitivity (true positive rate) in the first column and specificity (true negative rate) in the second column. |
Table 3 Static validation of confusion matrix on three models. |
| Model | Set | Accuracy | Precision | Recall | F1-score |
|---|---|---|---|---|---|
| MLP | Training set | 0.73102 | 0.74038 | 0.36150 | 0.48579 |
| Testing set | 0.74342 | 0.79167 | 0.35849 | 0.49351 | |
| SVM | Training set | 0.76733 | 0.86000 | 0.40376 | 0.51952 |
| Testing set | 0.75000 | 0.82609 | 0.35849 | 0.50000 | |
| RF | Training set | 0.71122 | 0.75676 | 0.26291 | 0.39024 |
| Testing set | 0.73026 | 0.83333 | 0.28320 | 0.42253 |
Note: F1-score, harmonic mean of precision and recall. |
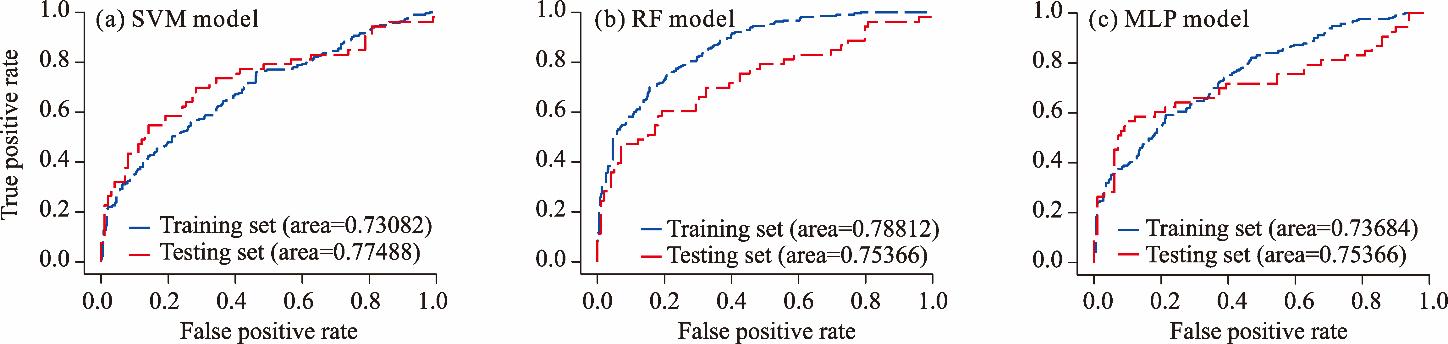
Fig. 10. Receiver Operating Characteristic (ROC) curve of three models. (a), SVM model; (b), RF model; (c), MLP model. |
Table 4 Comparison of model performance using DeLong’s test and Bootstrap permutation test. |
| Model comparison | Set | P-value (from DeLong’s test) | 95.00% CI (from Bootstrap permutation test) |
|---|---|---|---|
| SVM vs. MLP | Training set | <0.001 | (0.43019, 0.46114) |
| SVM vs. MLP | Testing set | <0.001 | (0.13491, 0.21950) |
| SVM vs. RF | Training set | 0.030 | (1.08170×10-6, 1.54030×10-5) |
| SVM vs. RF | Testing set | <0.001 | (0.07010, 0.13108) |
| MLP vs. RF | Training set | <0.001 | (-0.46115, -0.43019) |
| MLP vs. RF | Testing set | <0.001 | (-0.31723, -0.23814) |
Note: CI, confidence interval. |
Table 5 Risk assessment matrix integrating debris flow susceptibility and exposed element categories. |
| Exposed element | ||||||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| Susceptibility | 1 | Low | Low | Lower | Medium | Medium |
| 2 | Low | Lower | Medium | Medium | Higher | |
| 3 | Lower | Medium | Medium | Higher | Higher | |
| 4 | Medium | Medium | Higher | Higher | High | |
| 5 | Medium | Higher | Higher | High | High | |
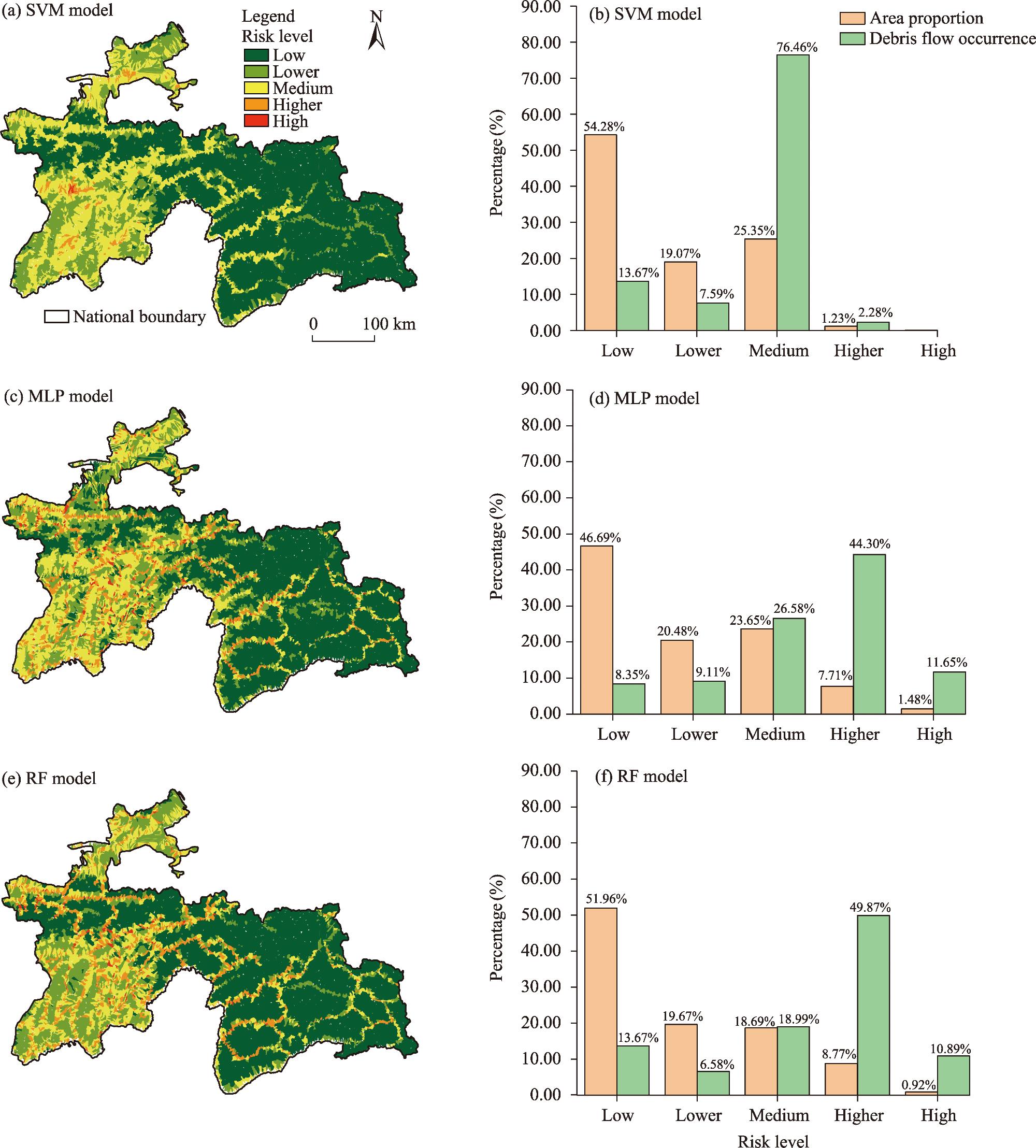
Fig. 11. Debris flow hazard risk based on population density. (a, c, and e), risk zoning based on population density in SVM model, MLP model, and RF model, respectively; (b, d, and f), area proportion of different hazard levels and the corresponding distribution of historical debris flows in SVM model, MLP model, and RF model, respectively. Note that the national boundary and state boundary were obtained from the GADM database version 4.2 (http://www.gadm.org/), which provides generalized boundaries and does not explicitly represent disputed or undetermined borders. The boundary of the standard map used in this study has not been modified. |
Fig. 12. Debris flow hazard risk based on road density. (a, c, and e), risk zoning based on road density in SVM model, MLP model, and RF model, respectively; (b, d, and f), area proportion of different hazard levels and the corresponding distribution of historical debris flows in SVM model, MLP model, and RF model, respectively. Note that the national boundary and state boundary were obtained from the GADM database version 4.2 (http://www.gadm.org/), which provides generalized boundaries and does not explicitly represent disputed or undetermined borders. The boundary of the standard map used in this study has not been modified. |
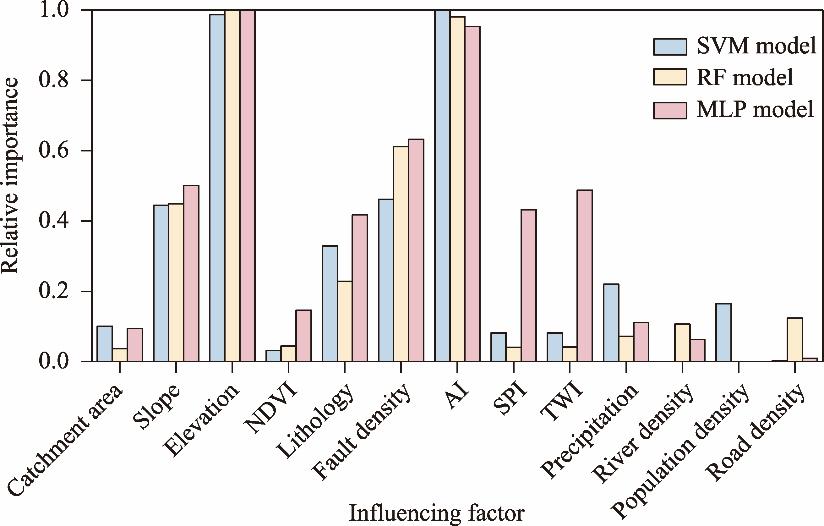
Fig. 13. Relative importance of the characteristic variables. |
| [1] |
Academy of Sciences of the Tajik SSR (Soviet Socialist Republic), 1968. Atlas of the Tajik Soviet Socialist Republic. Dushanbe: Main Administration of Geodesy and Cartography (GUGK) (in Russian).
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
|
| [42] |
|
| [43] |
|
| [44] |
|
| [45] |
|
| [46] |
|
| [47] |
Xinhua News Agency, 2021. Eight People Died in a Debris Flow in Tajikistan. [2025-07-15]. https://www.xinhuanet.com/world/2021-05/12/c_1127438295.htm?baike in Chinese).
|
| [48] |
|
| [49] |
|
| [50] |
|
| [51] |
|
| [52] |
|
| [53] |
|
| [54] |
|
| [55] |
|
| [56] |
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}